Rowan Hodson, Bruce Bassett, Charel van Hoof, Benjamin Rosman, Mark Solms, Jonathan P Shock, Ryan Smith
{"title":"Sophisticated Learning: A novel algorithm for active learning during model-based planning.","authors":"Rowan Hodson, Bruce Bassett, Charel van Hoof, Benjamin Rosman, Mark Solms, Jonathan P Shock, Ryan Smith","doi":"","DOIUrl":null,"url":null,"abstract":"<p><p>We introduce Sophisticated Learning (SL), a planning-to-learn algorithm that embeds active parameter learning inside the Sophisticated Inference (SI) tree-search framework of Active Inference. Unlike SI -- which optimizes beliefs about hidden states -- SL also updates beliefs about model parameters within each simulated branch, enabling counterfactual reasoning about how future observations would improve subsequent planning. We compared SL with Bayes-adaptive Reinforcement Learning (BARL) agents as well as with its parent algorithm, SI. Using a biologically inspired seasonal foraging task in which resources shift probabilistically over a 10x10 grid, we designed experiments that forced agents to balance probabilistic reward harvesting against information gathering. In early trials, where rapid learning is vital, SL agents survive, on average, 8.2% longer than SI and 35% longer than Bayes-adaptive Reinforcement Learning. While both SL and SI showed equal convergence performance, SL reached this convergence 40% faster than SI. Additionally, SL showed robust out-performance of other algorithms in altered environment configurations. Our results show that incorporating active learning into multi-step planning materially improves decision making under radical uncertainty, and reinforces the broader utility of Active Inference for modeling biologically relevant behavior.</p>","PeriodicalId":8425,"journal":{"name":"ArXiv","volume":" ","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2025-08-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/8d/70/nihpp-2308.08029v1.PMC10462173.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"ArXiv","FirstCategoryId":"1085","ListUrlMain":"","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
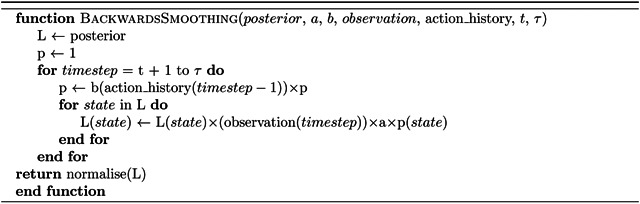
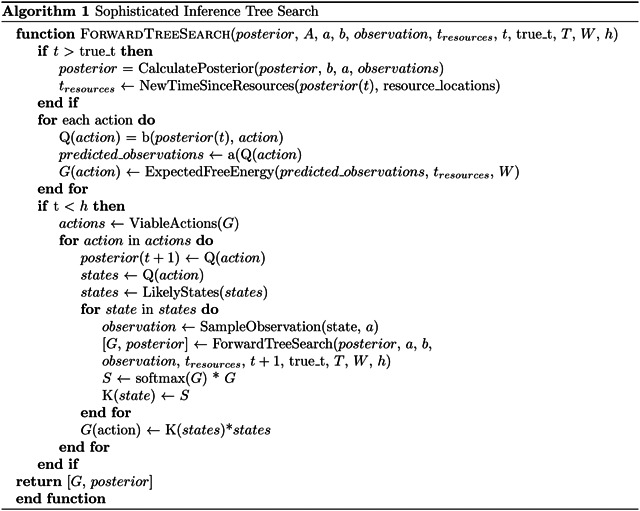
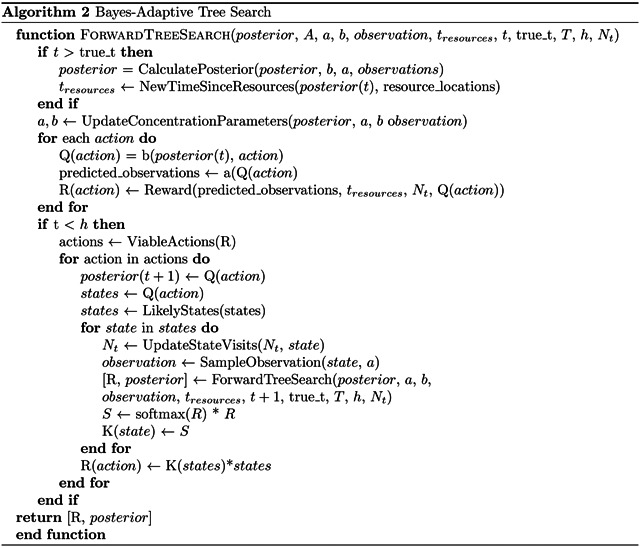
We introduce Sophisticated Learning (SL), a planning-to-learn algorithm that embeds active parameter learning inside the Sophisticated Inference (SI) tree-search framework of Active Inference. Unlike SI -- which optimizes beliefs about hidden states -- SL also updates beliefs about model parameters within each simulated branch, enabling counterfactual reasoning about how future observations would improve subsequent planning. We compared SL with Bayes-adaptive Reinforcement Learning (BARL) agents as well as with its parent algorithm, SI. Using a biologically inspired seasonal foraging task in which resources shift probabilistically over a 10x10 grid, we designed experiments that forced agents to balance probabilistic reward harvesting against information gathering. In early trials, where rapid learning is vital, SL agents survive, on average, 8.2% longer than SI and 35% longer than Bayes-adaptive Reinforcement Learning. While both SL and SI showed equal convergence performance, SL reached this convergence 40% faster than SI. Additionally, SL showed robust out-performance of other algorithms in altered environment configurations. Our results show that incorporating active learning into multi-step planning materially improves decision making under radical uncertainty, and reinforces the broader utility of Active Inference for modeling biologically relevant behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


