Morgan Salkowski, Enrico Checcucci, Alexander K Chow, Craig C Rogers, Firas Adbollah, Evangelos Liatsikos, Prokar Dasgupta, Gustavo C Guimaraes, Jens Rassweiler, Alexander Mottrie, Alberto Breda, Simone Crivellaro, Jihad Kaouk, Francesco Porpiglia, Riccardo Autorino
{"title":"New multiport robotic surgical systems: a comprehensive literature review of clinical outcomes in urology.","authors":"Morgan Salkowski, Enrico Checcucci, Alexander K Chow, Craig C Rogers, Firas Adbollah, Evangelos Liatsikos, Prokar Dasgupta, Gustavo C Guimaraes, Jens Rassweiler, Alexander Mottrie, Alberto Breda, Simone Crivellaro, Jihad Kaouk, Francesco Porpiglia, Riccardo Autorino","doi":"10.1177/17562872231177781","DOIUrl":null,"url":null,"abstract":"<p><p>Over the past 20 years, the field of robotic surgery has largely been dominated by the da Vinci robotic platform. Nevertheless, numerous novel multiport robotic surgical systems have been developed over the past decade, and some have recently been introduced into clinical practice. This nonsystematic review aims to describe novel surgical robotic systems, their individual designs, and their reported uses and clinical outcomes within the field of urologic surgery. Specifically, we performed a comprehensive review of the literature regarding the use of the Senhance robotic system, the CMR-Versius robotic system, and the Hugo RAS in urologic procedures. Systems with fewer published uses are also described, including the Avatera, Hintori, and Dexter. Notable features of each system are compared, with a particular emphasis on factors differentiating each system from the da Vinci robotic system.</p>","PeriodicalId":23010,"journal":{"name":"Therapeutic Advances in Urology","volume":"15 ","pages":"17562872231177781"},"PeriodicalIF":3.5000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/f5/39/10.1177_17562872231177781.PMC10265325.pdf","citationCount":"6","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Therapeutic Advances in Urology","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1177/17562872231177781","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"UROLOGY & NEPHROLOGY","Score":null,"Total":0}
引用次数: 6
Abstract
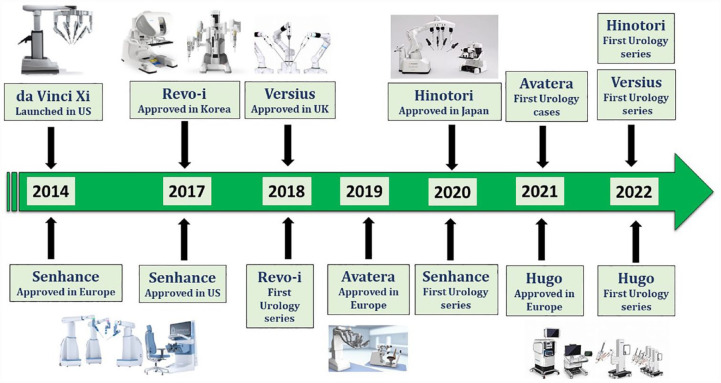
Over the past 20 years, the field of robotic surgery has largely been dominated by the da Vinci robotic platform. Nevertheless, numerous novel multiport robotic surgical systems have been developed over the past decade, and some have recently been introduced into clinical practice. This nonsystematic review aims to describe novel surgical robotic systems, their individual designs, and their reported uses and clinical outcomes within the field of urologic surgery. Specifically, we performed a comprehensive review of the literature regarding the use of the Senhance robotic system, the CMR-Versius robotic system, and the Hugo RAS in urologic procedures. Systems with fewer published uses are also described, including the Avatera, Hintori, and Dexter. Notable features of each system are compared, with a particular emphasis on factors differentiating each system from the da Vinci robotic system.
期刊介绍:
Therapeutic Advances in Urology delivers the highest quality peer-reviewed articles, reviews, and scholarly comment on pioneering efforts and innovative studies across all areas of urology.
The journal has a strong clinical and pharmacological focus and is aimed at clinicians and researchers in urology, providing a forum in print and online for publishing the highest quality articles in this area. The editors welcome articles of current interest across all areas of urology, including treatment of urological disorders, with a focus on emerging pharmacological therapies.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


