{"title":"A Comparative Defense of Self-initiated Prospective Moral Answerability for Autonomous Robot harm.","authors":"Marc Champagne, Ryan Tonkens","doi":"10.1007/s11948-023-00449-x","DOIUrl":null,"url":null,"abstract":"<p><p>As artificial intelligence becomes more sophisticated and robots approach autonomous decision-making, debates about how to assign moral responsibility have gained importance, urgency, and sophistication. Answering Stenseke's (2022a) call for scaffolds that can help us classify views and commitments, we think the current debate space can be represented hierarchically, as answers to key questions. We use the resulting taxonomy of five stances to differentiate-and defend-what is known as the \"blank check\" proposal. According to this proposal, a person activating a robot could willingly make themselves answerable for whatever events ensue, even if those events stem from the robot's autonomous decision(s). This blank check solution was originally proposed in the context of automated warfare (Champagne & Tonkens, 2015), but we extend it to cover all robots. We argue that, because moral answerability in the blank check is accepted voluntarily and before bad outcomes are known, it proves superior to alternative ways of assigning blame. We end by highlighting how, in addition to being just, this self-initiated and prospective moral answerability for robot harm provides deterrence that the four other stances cannot match.</p>","PeriodicalId":49564,"journal":{"name":"Science and Engineering Ethics","volume":"29 4","pages":"27"},"PeriodicalIF":2.7000,"publicationDate":"2023-07-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science and Engineering Ethics","FirstCategoryId":"98","ListUrlMain":"https://doi.org/10.1007/s11948-023-00449-x","RegionNum":2,"RegionCategory":"哲学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
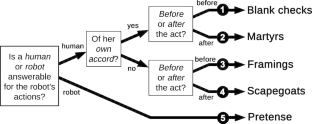
As artificial intelligence becomes more sophisticated and robots approach autonomous decision-making, debates about how to assign moral responsibility have gained importance, urgency, and sophistication. Answering Stenseke's (2022a) call for scaffolds that can help us classify views and commitments, we think the current debate space can be represented hierarchically, as answers to key questions. We use the resulting taxonomy of five stances to differentiate-and defend-what is known as the "blank check" proposal. According to this proposal, a person activating a robot could willingly make themselves answerable for whatever events ensue, even if those events stem from the robot's autonomous decision(s). This blank check solution was originally proposed in the context of automated warfare (Champagne & Tonkens, 2015), but we extend it to cover all robots. We argue that, because moral answerability in the blank check is accepted voluntarily and before bad outcomes are known, it proves superior to alternative ways of assigning blame. We end by highlighting how, in addition to being just, this self-initiated and prospective moral answerability for robot harm provides deterrence that the four other stances cannot match.
期刊介绍:
Science and Engineering Ethics is an international multidisciplinary journal dedicated to exploring ethical issues associated with science and engineering, covering professional education, research and practice as well as the effects of technological innovations and research findings on society.
While the focus of this journal is on science and engineering, contributions from a broad range of disciplines, including social sciences and humanities, are welcomed. Areas of interest include, but are not limited to, ethics of new and emerging technologies, research ethics, computer ethics, energy ethics, animals and human subjects ethics, ethics education in science and engineering, ethics in design, biomedical ethics, values in technology and innovation.
We welcome contributions that deal with these issues from an international perspective, particularly from countries that are underrepresented in these discussions.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


