【最新综述】点云融合技术综述:方法、应用与挑战(视频)
雷达学报
2026-01-08 10:00
文章摘要
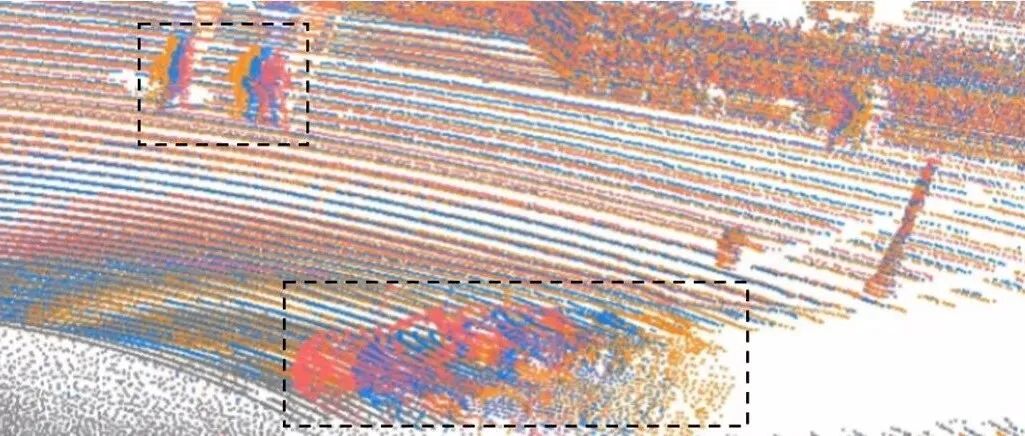
本文是一篇关于点云融合技术的综述文章。背景方面,点云融合是三维数据处理的关键技术,在自动驾驶、机器人SLAM、增强/虚拟现实等领域有重要应用,旨在通过融合不同来源的数据提升感知与重建的精度和鲁棒性。研究目的上,文章旨在系统梳理和综述现有的点云融合方法,将其分为多源点云融合、多帧点云融合和多视角点云融合三类,并详细分析每类方法的技术特点、发展历程与应用场景。结论指出,点云融合技术已展现出巨大潜力,该综述为相关研究提供了重要参考,并指明了未来在提升精度、鲁棒性和效率方面的研究方向与挑战。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
雷达学报

《雷达学报》2025年度优秀论文发布.
2026-02-06

【最新成果】低仰角目标高精度波束空间DOA估计方法(视频).
2026-02-02

“AIRSAT-Water-1.0高分辨率水体监测SAR数据集”正式发布.
2026-01-29

《雷达学报》2025年第6期目次 含运动平台雷达空时自适应信号处理技术专题.
2026-01-28
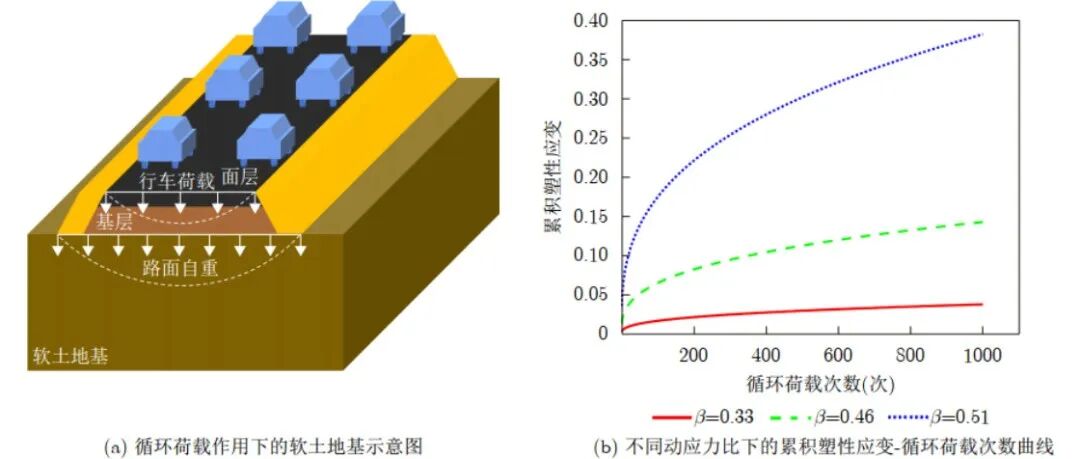
【最新成果】循环荷载作用下软土地基公路InSAR时序形变估计方法研究(视频).
2026-01-27
最新文章
《雷达学报》2025年度优秀论文发布
2026-02-06
【最新成果】低仰角目标高精度波束空间DOA估计方法(视频)
2026-02-02
“AIRSAT-Water-1.0高分辨率水体监测SAR数据集”正式发布
2026-01-29
《雷达学报》2025年第6期目次 含运动平台雷达空时自适应信号处理技术专题
2026-01-28

