UCLA 贺曦敏教授团队 Nat. Commun.: 自适应环境功能的仿生多模态软体驱动器
高分子科技
2025-08-19 16:23
文章摘要
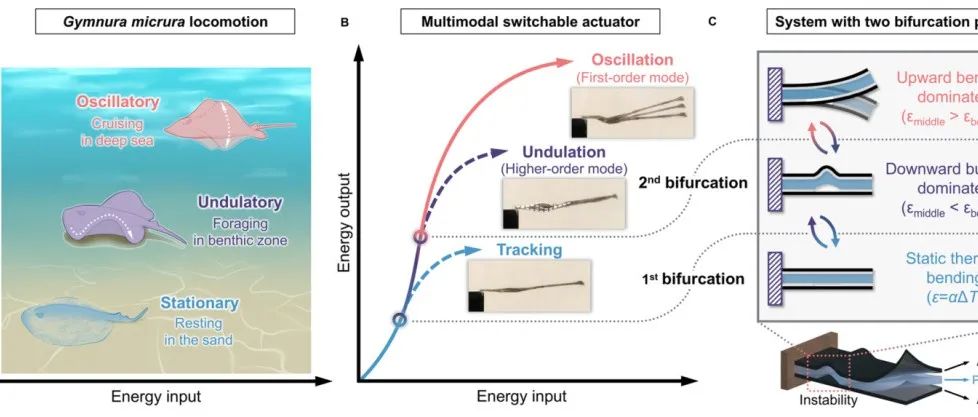
本文介绍了加州大学洛杉矶分校贺曦敏教授团队开发的一种具有环境自适应能力的光响应软体驱动器。该驱动器受䲟鱼多模式运动策略启发,通过设计非对称三层结构和引入可控缺陷,实现了追踪、波动和振荡三种运动模式的自发切换。其内置双分岔点物理智能系统可响应光强、粘度、温度及物理接触等环境变化,无需外部控制单元。这项研究为新一代自主软体机器人奠定了关键技术基础,拓展了流体操控、电子发电与环境监测等应用场景。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Local reaction-global diffusion unlocks high-performance Mg<sub>3</sub>(Sb,Bi)<sub>2</sub>-based thermoelectrics.
DOI: 10.1016/j.scib.2025.11.037
Pub Date : 2026-03-15
Date: 2025/11/21 0:00:00

Physical Crowding in 3D Niche Regulates Neural Stem Cell Differentiation via Cx43-mediated Gap Junction Communication
DOI: 10.1016/j.isci.2026.115272
Pub Date : 2026-03-01

Structural dynamics and immunogenicity of the recombinant and outer membrane vesicle-embedded Meningococcal antigen NadA
DOI: 10.1038/s41467-026-70059-1
Pub Date : 2026-03-11
高分子科技





中国造出 “世界最强” 碳纤维 实现百吨级量产.
23小时前
最新文章

