DeepMind:乒乓球agent的一小拍,自主学习机器人的一大步
学术头条
2025-07-23 16:00
文章摘要
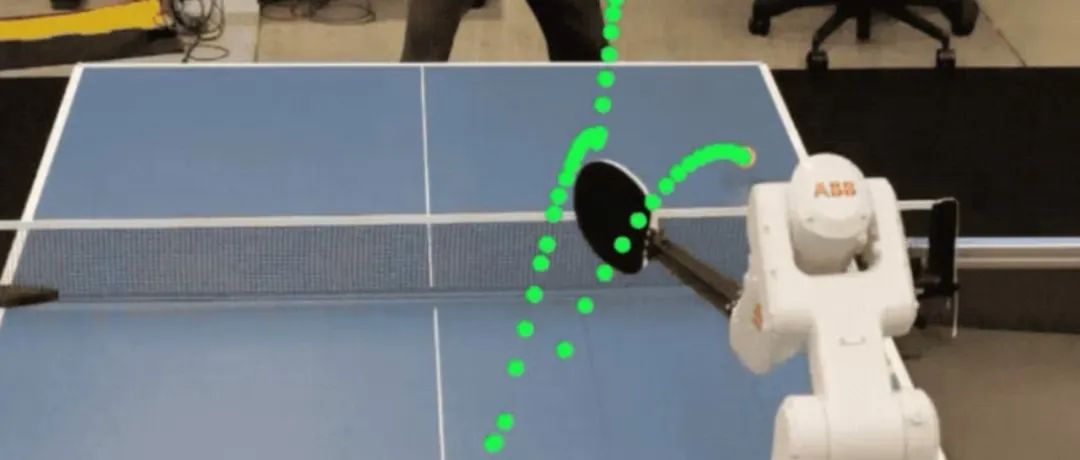
本文探讨了如何通过自主学习和适应性训练提升机器人性能,减少对人类干预的依赖。研究背景在于传统机器人控制需要大量专家编程和参数调整,而机器学习虽具潜力但仍需大量人工监督。研究目的是通过让两个机器人智能体在对抗环境中自我提升,探索更自主的学习方法。选择乒乓球作为测试平台,因其动态环境能体现机器人技术的挑战。研究结论表明,通过竞争性对战和视觉语言模型(VLM)作为教练,机器人能逐步提升技能,达到业余人类水平,但仍需解决稳定性和扩展性等挑战。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
学术头条

年终拆解:爆火的AI Coding Agent是什么?有哪些“坑”?.
2025-12-29

Meta公布“超级智能”新进展:无需人类,软件Agent即可自我训练!.
2025-12-26

人人编程时代到来!智谱发布GLM-4.7:Vide Coding能力全球开源第一.
2025-12-23

全球首次实现!上海交大推出全光生成式AI芯片LightGen,研究登上Science.
2025-12-22

最新文章

比二维码还小!Meta发布TinyLoRA:13个参数媲美全量,RL完胜SFT
2026-02-06

ICLR 2026 | GPT-5竟给废图打高分?首个图表“信达雅”评测基准发布
2026-02-04

Wiley高层访问中国市场:加速AI布局,助力人工智能驱动型研究的发展
2026-02-04

代码直接变论文!MSRA同款Agent库开源,读Repo一键生成初稿
2026-02-03

