研究进展:软体机器人-水母的“具身智能” | Nature Communications
今日新材料
2025-05-26 05:51
文章摘要
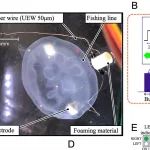
本文介绍了日本东北大学Dai Owaki等人在Nature Communications上发表的研究,提出了一种预测和控制水母运动的方法,利用水母的自然智能开发生物混合机器人。研究通过集成的肌肉电刺激和3D运动捕捉系统,量化了蓝水母的自发和刺激诱导行为,发现电刺激输入信号的最佳周期为1.5和2.0秒。利用储备池计算(一种机器学习框架)成功预测了受刺激水母的未来运动,为开发具有自主导航和环境探索能力的水母半机械人提供了基础。这一技术在海洋监测和污染管理中具有潜在的应用。
本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者速来电或来函联系。
推荐文献

Complex terrain causes global model prediction biases of 21.7 Zhengzhou extreme precipitation
DOI: 10.1016/j.scib.2025.09.015
Pub Date : 2026-01-30

Erratum: Combined HIF-1α blockade and CHIR99021 treatment reverses pulmonary fibrosis via modulation endothelial-to-mesenchymal transition.
DOI: 10.1016/j.isci.2026.114722
Pub Date : 2026-01-22
Date: 2026/2/20 0:00:00

Local cloud enhancement associated with urban morphology: evidence from observations and idealized large-eddy simulations
DOI: 10.1038/s41467-026-68986-0
Pub Date : 2026-02-05
今日新材料










