{"title":"婴儿早期动作分化发展的动力系统模型:身体代理的必要条件。","authors":"Ryo Fujihira, Gentaro Taga","doi":"10.1007/s00422-023-00955-y","DOIUrl":null,"url":null,"abstract":"<p><p>Young infants are sensitive to whether their body movements cause subsequent events or not during the interaction with the environment. This ability has been revealed by empirical studies on the reinforcement of limb movements when a string is attached between an infant limb and a mobile toy suspended overhead. A previous study reproduced the experimental observation by modeling both the infant's limb and a mobile toy as a system of coupled oscillators. The authors then argued that emergence of agency could be explained by a phase transition in the dynamical system: from a weakly coupled state to a state where the both movements of the limb and the toy are highly coordinated. However, what remains unexplained is the following experimental observation: When the limb is connected to the mobile toy by a string, the infant increases the average velocity of the arm's movement. On the other hand, when the toy is controlled externally, the average arm's velocity is greatly reduced. Since young infants produce exuberant spontaneous movements even with no external stimuli, the inhibition of motor action to suppress the formation of spurious action-perception coupling should be also a crucial sign for the emergence of agency. Thus, we present a dynamical system model for the development of action differentiation, to move or not to move, in the mobile task. In addition to the pair of limb and mobile oscillators for providing positive feedback for reinforcement in the previous model, bifurcation dynamics are incorporated to enhance or inhibit self-movements in response to detecting contingencies between the limb and mobile movements. The results from computer simulations reproduce experimental observations on the developmental emergence of action differentiation between 2 and 3 months of age in the form of a bifurcation diagram. We infer that the emergence of physical agency entails young infants' ability not only to enhance a specific action-perception coupling, but also to decouple it and create a new mode of action-perception coupling based on the internal state dynamics with contingency detection between self-generated actions and environmental events.</p>","PeriodicalId":55374,"journal":{"name":"Biological Cybernetics","volume":"117 1-2","pages":"81-93"},"PeriodicalIF":1.6000,"publicationDate":"2023-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10160167/pdf/","citationCount":"0","resultStr":"{\"title\":\"Dynamical systems model of development of the action differentiation in early infancy: a requisite of physical agency.\",\"authors\":\"Ryo Fujihira, Gentaro Taga\",\"doi\":\"10.1007/s00422-023-00955-y\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Young infants are sensitive to whether their body movements cause subsequent events or not during the interaction with the environment. This ability has been revealed by empirical studies on the reinforcement of limb movements when a string is attached between an infant limb and a mobile toy suspended overhead. A previous study reproduced the experimental observation by modeling both the infant's limb and a mobile toy as a system of coupled oscillators. The authors then argued that emergence of agency could be explained by a phase transition in the dynamical system: from a weakly coupled state to a state where the both movements of the limb and the toy are highly coordinated. However, what remains unexplained is the following experimental observation: When the limb is connected to the mobile toy by a string, the infant increases the average velocity of the arm's movement. On the other hand, when the toy is controlled externally, the average arm's velocity is greatly reduced. Since young infants produce exuberant spontaneous movements even with no external stimuli, the inhibition of motor action to suppress the formation of spurious action-perception coupling should be also a crucial sign for the emergence of agency. Thus, we present a dynamical system model for the development of action differentiation, to move or not to move, in the mobile task. In addition to the pair of limb and mobile oscillators for providing positive feedback for reinforcement in the previous model, bifurcation dynamics are incorporated to enhance or inhibit self-movements in response to detecting contingencies between the limb and mobile movements. The results from computer simulations reproduce experimental observations on the developmental emergence of action differentiation between 2 and 3 months of age in the form of a bifurcation diagram. We infer that the emergence of physical agency entails young infants' ability not only to enhance a specific action-perception coupling, but also to decouple it and create a new mode of action-perception coupling based on the internal state dynamics with contingency detection between self-generated actions and environmental events.</p>\",\"PeriodicalId\":55374,\"journal\":{\"name\":\"Biological Cybernetics\",\"volume\":\"117 1-2\",\"pages\":\"81-93\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2023-04-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10160167/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biological Cybernetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s00422-023-00955-y\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/1/19 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, CYBERNETICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biological Cybernetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00422-023-00955-y","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/19 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
Dynamical systems model of development of the action differentiation in early infancy: a requisite of physical agency.
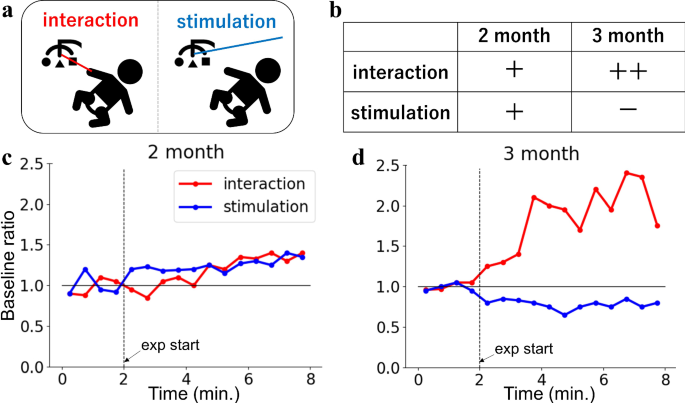
Young infants are sensitive to whether their body movements cause subsequent events or not during the interaction with the environment. This ability has been revealed by empirical studies on the reinforcement of limb movements when a string is attached between an infant limb and a mobile toy suspended overhead. A previous study reproduced the experimental observation by modeling both the infant's limb and a mobile toy as a system of coupled oscillators. The authors then argued that emergence of agency could be explained by a phase transition in the dynamical system: from a weakly coupled state to a state where the both movements of the limb and the toy are highly coordinated. However, what remains unexplained is the following experimental observation: When the limb is connected to the mobile toy by a string, the infant increases the average velocity of the arm's movement. On the other hand, when the toy is controlled externally, the average arm's velocity is greatly reduced. Since young infants produce exuberant spontaneous movements even with no external stimuli, the inhibition of motor action to suppress the formation of spurious action-perception coupling should be also a crucial sign for the emergence of agency. Thus, we present a dynamical system model for the development of action differentiation, to move or not to move, in the mobile task. In addition to the pair of limb and mobile oscillators for providing positive feedback for reinforcement in the previous model, bifurcation dynamics are incorporated to enhance or inhibit self-movements in response to detecting contingencies between the limb and mobile movements. The results from computer simulations reproduce experimental observations on the developmental emergence of action differentiation between 2 and 3 months of age in the form of a bifurcation diagram. We infer that the emergence of physical agency entails young infants' ability not only to enhance a specific action-perception coupling, but also to decouple it and create a new mode of action-perception coupling based on the internal state dynamics with contingency detection between self-generated actions and environmental events.
期刊介绍:
Biological Cybernetics is an interdisciplinary medium for theoretical and application-oriented aspects of information processing in organisms, including sensory, motor, cognitive, and ecological phenomena. Topics covered include: mathematical modeling of biological systems; computational, theoretical or engineering studies with relevance for understanding biological information processing; and artificial implementation of biological information processing and self-organizing principles. Under the main aspects of performance and function of systems, emphasis is laid on communication between life sciences and technical/theoretical disciplines.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


