{"title":"三体问题的自然动力学还原。","authors":"Barak Kol","doi":"10.1007/s10569-023-10144-5","DOIUrl":null,"url":null,"abstract":"<p><p>The three-body problem is a fundamental long-standing open problem, with applications in all branches of physics, including astrophysics, nuclear physics and particle physics. In general, conserved quantities allow to reduce the formulation of a mechanical problem to fewer degrees of freedom, a process known as dynamical reduction. However, extant reductions are either non-general, or hide the problem's symmetry or include unexplained definitions. This paper presents a general and natural dynamical reduction, which avoids these issues. Any three-body configuration defines a triangle, and its orientation in space. Accordingly, we decompose the dynamical variables into the geometry (shape + size) and orientation of the triangle. The geometry variables are shown to describe the motion of an abstract point in a curved 3d space, subject to a potential-derived force and a magnetic-like force with a monopole charge. The orientation variables are shown to obey a dynamics analogous to the Euler equations for a rotating rigid body; only here the moments of inertia depend on the geometry variables, rather than being constant. The reduction rests on a novel symmetric solution to the center of mass constraint inspired by Lagrange's solution to the cubic. The formulation of the orientation variables is novel and rests on a partially known generalization of the Euler-Lagrange equations to non-coordinate velocities. Applications to global features, to the statistical solution, to special exact solutions and to economized simulations are presented. A generalization to the four-body problem is presented.</p>","PeriodicalId":72537,"journal":{"name":"Celestial mechanics and dynamical astronomy","volume":"135 3","pages":"29"},"PeriodicalIF":1.4000,"publicationDate":"2023-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10184114/pdf/","citationCount":"0","resultStr":"{\"title\":\"Natural dynamical reduction of the three-body problem.\",\"authors\":\"Barak Kol\",\"doi\":\"10.1007/s10569-023-10144-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The three-body problem is a fundamental long-standing open problem, with applications in all branches of physics, including astrophysics, nuclear physics and particle physics. In general, conserved quantities allow to reduce the formulation of a mechanical problem to fewer degrees of freedom, a process known as dynamical reduction. However, extant reductions are either non-general, or hide the problem's symmetry or include unexplained definitions. This paper presents a general and natural dynamical reduction, which avoids these issues. Any three-body configuration defines a triangle, and its orientation in space. Accordingly, we decompose the dynamical variables into the geometry (shape + size) and orientation of the triangle. The geometry variables are shown to describe the motion of an abstract point in a curved 3d space, subject to a potential-derived force and a magnetic-like force with a monopole charge. The orientation variables are shown to obey a dynamics analogous to the Euler equations for a rotating rigid body; only here the moments of inertia depend on the geometry variables, rather than being constant. The reduction rests on a novel symmetric solution to the center of mass constraint inspired by Lagrange's solution to the cubic. The formulation of the orientation variables is novel and rests on a partially known generalization of the Euler-Lagrange equations to non-coordinate velocities. Applications to global features, to the statistical solution, to special exact solutions and to economized simulations are presented. A generalization to the four-body problem is presented.</p>\",\"PeriodicalId\":72537,\"journal\":{\"name\":\"Celestial mechanics and dynamical astronomy\",\"volume\":\"135 3\",\"pages\":\"29\"},\"PeriodicalIF\":1.4000,\"publicationDate\":\"2023-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10184114/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Celestial mechanics and dynamical astronomy\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s10569-023-10144-5\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2023/5/15 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Celestial mechanics and dynamical astronomy","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s10569-023-10144-5","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/5/15 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Natural dynamical reduction of the three-body problem.
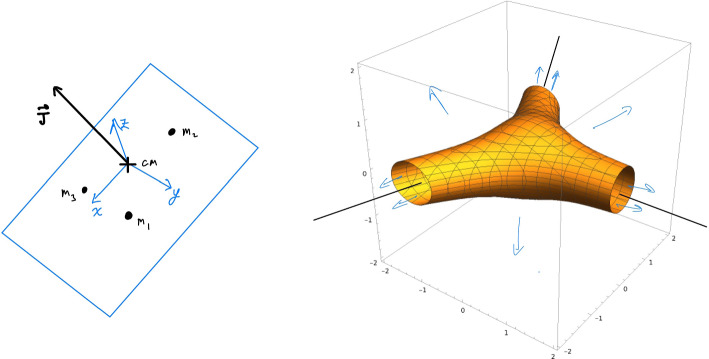
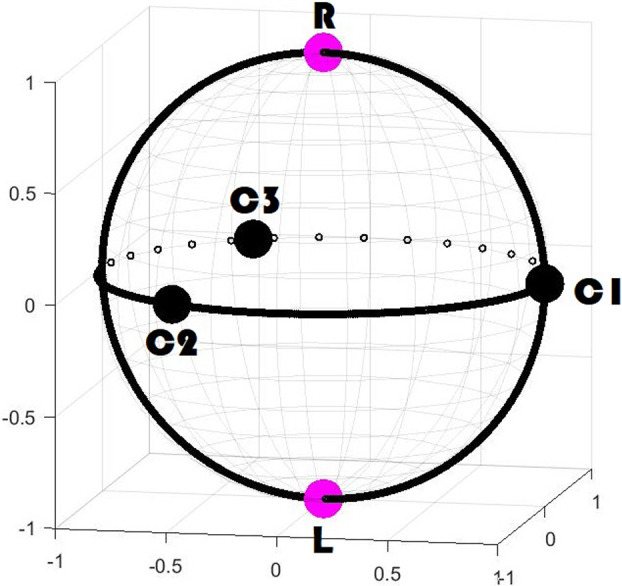
The three-body problem is a fundamental long-standing open problem, with applications in all branches of physics, including astrophysics, nuclear physics and particle physics. In general, conserved quantities allow to reduce the formulation of a mechanical problem to fewer degrees of freedom, a process known as dynamical reduction. However, extant reductions are either non-general, or hide the problem's symmetry or include unexplained definitions. This paper presents a general and natural dynamical reduction, which avoids these issues. Any three-body configuration defines a triangle, and its orientation in space. Accordingly, we decompose the dynamical variables into the geometry (shape + size) and orientation of the triangle. The geometry variables are shown to describe the motion of an abstract point in a curved 3d space, subject to a potential-derived force and a magnetic-like force with a monopole charge. The orientation variables are shown to obey a dynamics analogous to the Euler equations for a rotating rigid body; only here the moments of inertia depend on the geometry variables, rather than being constant. The reduction rests on a novel symmetric solution to the center of mass constraint inspired by Lagrange's solution to the cubic. The formulation of the orientation variables is novel and rests on a partially known generalization of the Euler-Lagrange equations to non-coordinate velocities. Applications to global features, to the statistical solution, to special exact solutions and to economized simulations are presented. A generalization to the four-body problem is presented.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


