{"title":"一种用于手持式半球形激光雷达- IMU集成系统的低漂移实时定位和制图方法","authors":"X. Duan, Qingwu Hu, P. Zhao, Fei Yu, M. Ai","doi":"10.1111/phor.12447","DOIUrl":null,"url":null,"abstract":"This paper proposes a simultaneous localisation and mapping (SLAM) framework that uses a handheld hemispherical view LiDAR‐IMU integration system. Inspired by the specific characteristic of the hemispherical view LiDAR, a ground segmentation module based on seed points is designed. The ground points are then downsampled to eliminate redundant vertical constraints. The IMU data and the pre‐processed point cloud are used to perform state estimation via a tightly coupled iterative extended Kalman filter (iEKF) to obtain the pose estimation. The automatically detected loop closures provide closed‐loop constraints for the odometry, and a factor graph ensures the global consistency of the map. Data from diverse scenes are collected via a prototype system. Both qualitative and quantitative experiments are carried out to verify the framework's performance. According to the experimental results, our framework achieves low‐drift, high‐coverage and real‐time performance, outperforming the state‐of‐the‐art LiDAR SLAM methods in our handheld hemispherical view LiDAR‐IMU test sites. For the research community's benefit, the dataset is publicly provided for other researchers to compare against.","PeriodicalId":22881,"journal":{"name":"The Photogrammetric Record","volume":"139 1","pages":"176 - 196"},"PeriodicalIF":0.0000,"publicationDate":"2023-06-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"1","resultStr":"{\"title\":\"A low‐drift and real‐time localisation and mapping method for handheld hemispherical view LiDAR‐IMU integration system\",\"authors\":\"X. Duan, Qingwu Hu, P. Zhao, Fei Yu, M. Ai\",\"doi\":\"10.1111/phor.12447\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"This paper proposes a simultaneous localisation and mapping (SLAM) framework that uses a handheld hemispherical view LiDAR‐IMU integration system. Inspired by the specific characteristic of the hemispherical view LiDAR, a ground segmentation module based on seed points is designed. The ground points are then downsampled to eliminate redundant vertical constraints. The IMU data and the pre‐processed point cloud are used to perform state estimation via a tightly coupled iterative extended Kalman filter (iEKF) to obtain the pose estimation. The automatically detected loop closures provide closed‐loop constraints for the odometry, and a factor graph ensures the global consistency of the map. Data from diverse scenes are collected via a prototype system. Both qualitative and quantitative experiments are carried out to verify the framework's performance. According to the experimental results, our framework achieves low‐drift, high‐coverage and real‐time performance, outperforming the state‐of‐the‐art LiDAR SLAM methods in our handheld hemispherical view LiDAR‐IMU test sites. For the research community's benefit, the dataset is publicly provided for other researchers to compare against.\",\"PeriodicalId\":22881,\"journal\":{\"name\":\"The Photogrammetric Record\",\"volume\":\"139 1\",\"pages\":\"176 - 196\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2023-06-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"1\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The Photogrammetric Record\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1111/phor.12447\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The Photogrammetric Record","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1111/phor.12447","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
A low‐drift and real‐time localisation and mapping method for handheld hemispherical view LiDAR‐IMU integration system
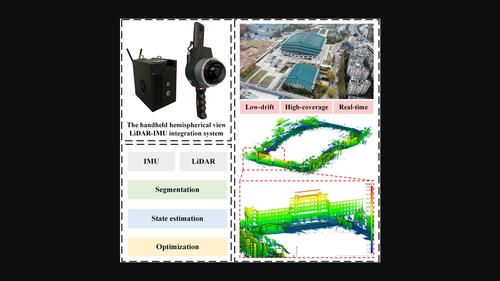
This paper proposes a simultaneous localisation and mapping (SLAM) framework that uses a handheld hemispherical view LiDAR‐IMU integration system. Inspired by the specific characteristic of the hemispherical view LiDAR, a ground segmentation module based on seed points is designed. The ground points are then downsampled to eliminate redundant vertical constraints. The IMU data and the pre‐processed point cloud are used to perform state estimation via a tightly coupled iterative extended Kalman filter (iEKF) to obtain the pose estimation. The automatically detected loop closures provide closed‐loop constraints for the odometry, and a factor graph ensures the global consistency of the map. Data from diverse scenes are collected via a prototype system. Both qualitative and quantitative experiments are carried out to verify the framework's performance. According to the experimental results, our framework achieves low‐drift, high‐coverage and real‐time performance, outperforming the state‐of‐the‐art LiDAR SLAM methods in our handheld hemispherical view LiDAR‐IMU test sites. For the research community's benefit, the dataset is publicly provided for other researchers to compare against.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


