{"title":"论机构理论的图与结构公式","authors":"M. D. Kovalev","doi":"10.1134/S1990478923030109","DOIUrl":null,"url":null,"abstract":"<p> Structural formulas in the theory of mechanisms are formulas expressing the number of\ndegrees of freedom of a device in terms of the numbers of its links and kinematic pairs. It is well\nknown that they are not always true. Mathematical graph theory helps to understand this\nphenomenon. The validity of structural formulas in the case of generic frameworks is completely\ndetermined by their structure, described by graphs. The present paper considers two models of\nplanar frameworks with rotational pairs. The first model is a construction made up of straight\nrods (levers) bearing hinges at the ends. Such devices are naturally associated with a graph\n<span>\\( G \\)</span> with vertices corresponding to hinges and edges corresponding to levers. In\nthe theory of mechanisms, it is customary to consider another graph\n<span>\\( \\cal G \\)</span> whose vertices correspond to links and the edges correspond to kinematic\npairs. It turns out that the use of the graph\n<span>\\( G \\)</span> to describe the structure both in the first model and in the second one, which\ncontains all planar constructions with rotational pairs, is preferable to the graph\n<span>\\( \\cal G \\)</span>. In particular, it allows one to provide a criterion for the applicability of\nstructural formulas for generic devices of a given structure.\n</p>","PeriodicalId":607,"journal":{"name":"Journal of Applied and Industrial Mathematics","volume":"17 3","pages":"571 - 581"},"PeriodicalIF":0.5800,"publicationDate":"2023-11-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"On Graphs and Structural Formulas of the Mechanisms Theory\",\"authors\":\"M. D. Kovalev\",\"doi\":\"10.1134/S1990478923030109\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p> Structural formulas in the theory of mechanisms are formulas expressing the number of\\ndegrees of freedom of a device in terms of the numbers of its links and kinematic pairs. It is well\\nknown that they are not always true. Mathematical graph theory helps to understand this\\nphenomenon. The validity of structural formulas in the case of generic frameworks is completely\\ndetermined by their structure, described by graphs. The present paper considers two models of\\nplanar frameworks with rotational pairs. The first model is a construction made up of straight\\nrods (levers) bearing hinges at the ends. Such devices are naturally associated with a graph\\n<span>\\\\( G \\\\)</span> with vertices corresponding to hinges and edges corresponding to levers. In\\nthe theory of mechanisms, it is customary to consider another graph\\n<span>\\\\( \\\\cal G \\\\)</span> whose vertices correspond to links and the edges correspond to kinematic\\npairs. It turns out that the use of the graph\\n<span>\\\\( G \\\\)</span> to describe the structure both in the first model and in the second one, which\\ncontains all planar constructions with rotational pairs, is preferable to the graph\\n<span>\\\\( \\\\cal G \\\\)</span>. In particular, it allows one to provide a criterion for the applicability of\\nstructural formulas for generic devices of a given structure.\\n</p>\",\"PeriodicalId\":607,\"journal\":{\"name\":\"Journal of Applied and Industrial Mathematics\",\"volume\":\"17 3\",\"pages\":\"571 - 581\"},\"PeriodicalIF\":0.5800,\"publicationDate\":\"2023-11-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Applied and Industrial Mathematics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S1990478923030109\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"Engineering\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Applied and Industrial Mathematics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1134/S1990478923030109","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"Engineering","Score":null,"Total":0}
On Graphs and Structural Formulas of the Mechanisms Theory
Structural formulas in the theory of mechanisms are formulas expressing the number of
degrees of freedom of a device in terms of the numbers of its links and kinematic pairs. It is well
known that they are not always true. Mathematical graph theory helps to understand this
phenomenon. The validity of structural formulas in the case of generic frameworks is completely
determined by their structure, described by graphs. The present paper considers two models of
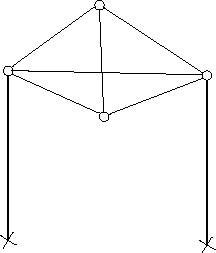
planar frameworks with rotational pairs. The first model is a construction made up of straight
rods (levers) bearing hinges at the ends. Such devices are naturally associated with a graph
\( G \) with vertices corresponding to hinges and edges corresponding to levers. In
the theory of mechanisms, it is customary to consider another graph
\( \cal G \) whose vertices correspond to links and the edges correspond to kinematic
pairs. It turns out that the use of the graph
\( G \) to describe the structure both in the first model and in the second one, which
contains all planar constructions with rotational pairs, is preferable to the graph
\( \cal G \). In particular, it allows one to provide a criterion for the applicability of
structural formulas for generic devices of a given structure.
期刊介绍:
Journal of Applied and Industrial Mathematics is a journal that publishes original and review articles containing theoretical results and those of interest for applications in various branches of industry. The journal topics include the qualitative theory of differential equations in application to mechanics, physics, chemistry, biology, technical and natural processes; mathematical modeling in mechanics, physics, engineering, chemistry, biology, ecology, medicine, etc.; control theory; discrete optimization; discrete structures and extremum problems; combinatorics; control and reliability of discrete circuits; mathematical programming; mathematical models and methods for making optimal decisions; models of theory of scheduling, location and replacement of equipment; modeling the control processes; development and analysis of algorithms; synthesis and complexity of control systems; automata theory; graph theory; game theory and its applications; coding theory; scheduling theory; and theory of circuits.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


