平面情况下球面机器人的神经网络运动控制
IF 0.7
Q4 MECHANICS
引用次数: 0
摘要
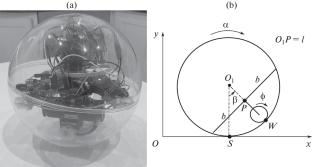
考虑了球面机器人的平面模型,该模型包含一个带轮子的平台。推导了该机器人的动力学方程,并讨论了有关方程的一些假设。提出了一种基于多层神经网络的控制方法。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Neural Network Motion Control of a Spherical Robot in Planar Case
A plane model of a spherical robot containing a platform with a wheel is considered. Dynamic equations are derived for this robot and some assumptions concerning these equations are also discussed. A control is proposed using a multilayer neural network.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Moscow University Mechanics Bulletin
MECHANICS-
CiteScore
0.60
自引率
0.00%
发文量
9
期刊介绍:
Moscow University Mechanics Bulletin is the journal of scientific publications, reflecting the most important areas of mechanics at Lomonosov Moscow State University. The journal is dedicated to research in theoretical mechanics, applied mechanics and motion control, hydrodynamics, aeromechanics, gas and wave dynamics, theory of elasticity, theory of elasticity and mechanics of composites.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


