{"title":"具有边界输入扰动的均匀旋转圆盘梁-质量系统的镇定","authors":"My Driss Aouragh, Mohamed Nahli, M’hamed Segaoui","doi":"10.1007/s40065-022-00391-z","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we study the stabilization problem of a disk beam structure with disturbance. Specifically, the structure consists of a beam clamped at one end to the center of a rotating rigid disk, while the other end is attached to a tip mass subject to a non-uniform bounded disturbance. We start the investigation by designing the controller via the Active disturbance rejection control (ADRC) approach. The high gain extended state observer (ESO) is first designed to estimate the disturbance, then the feedback observer-based controller is designed to employ the estimation to cancel the disturbance effect. Furthermore, the well-posedeness of the controlled system is proved using the semigroup theory. Using the Lyapunov method, the exponential stability is proved. Finally, the performance of the control method is illustrated by simulation results.</p></div>","PeriodicalId":54135,"journal":{"name":"Arabian Journal of Mathematics","volume":"12 1","pages":"35 - 48"},"PeriodicalIF":0.9000,"publicationDate":"2022-09-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://link.springer.com/content/pdf/10.1007/s40065-022-00391-z.pdf","citationCount":"0","resultStr":"{\"title\":\"Stabilization of a uniform rotating disk-beam-mass system with boundary input disturbance\",\"authors\":\"My Driss Aouragh, Mohamed Nahli, M’hamed Segaoui\",\"doi\":\"10.1007/s40065-022-00391-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In this paper, we study the stabilization problem of a disk beam structure with disturbance. Specifically, the structure consists of a beam clamped at one end to the center of a rotating rigid disk, while the other end is attached to a tip mass subject to a non-uniform bounded disturbance. We start the investigation by designing the controller via the Active disturbance rejection control (ADRC) approach. The high gain extended state observer (ESO) is first designed to estimate the disturbance, then the feedback observer-based controller is designed to employ the estimation to cancel the disturbance effect. Furthermore, the well-posedeness of the controlled system is proved using the semigroup theory. Using the Lyapunov method, the exponential stability is proved. Finally, the performance of the control method is illustrated by simulation results.</p></div>\",\"PeriodicalId\":54135,\"journal\":{\"name\":\"Arabian Journal of Mathematics\",\"volume\":\"12 1\",\"pages\":\"35 - 48\"},\"PeriodicalIF\":0.9000,\"publicationDate\":\"2022-09-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://link.springer.com/content/pdf/10.1007/s40065-022-00391-z.pdf\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Arabian Journal of Mathematics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s40065-022-00391-z\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"MATHEMATICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Arabian Journal of Mathematics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s40065-022-00391-z","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATHEMATICS","Score":null,"Total":0}
Stabilization of a uniform rotating disk-beam-mass system with boundary input disturbance
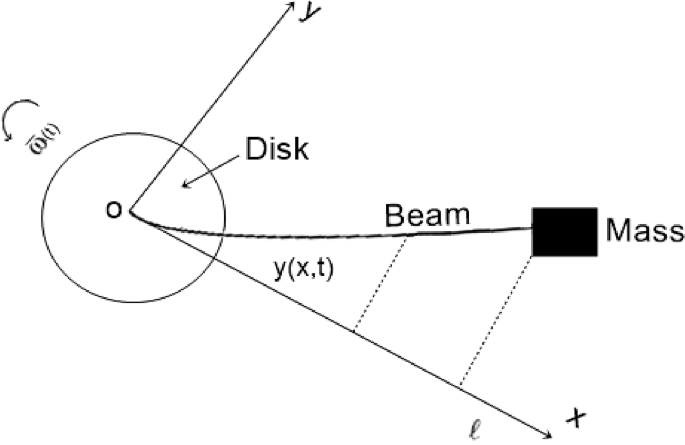
In this paper, we study the stabilization problem of a disk beam structure with disturbance. Specifically, the structure consists of a beam clamped at one end to the center of a rotating rigid disk, while the other end is attached to a tip mass subject to a non-uniform bounded disturbance. We start the investigation by designing the controller via the Active disturbance rejection control (ADRC) approach. The high gain extended state observer (ESO) is first designed to estimate the disturbance, then the feedback observer-based controller is designed to employ the estimation to cancel the disturbance effect. Furthermore, the well-posedeness of the controlled system is proved using the semigroup theory. Using the Lyapunov method, the exponential stability is proved. Finally, the performance of the control method is illustrated by simulation results.
期刊介绍:
The Arabian Journal of Mathematics is a quarterly, peer-reviewed open access journal published under the SpringerOpen brand, covering all mainstream branches of pure and applied mathematics.
Owned by King Fahd University of Petroleum and Minerals, AJM publishes carefully refereed research papers in all main-stream branches of pure and applied mathematics. Survey papers may be submitted for publication by invitation only.To be published in AJM, a paper should be a significant contribution to the mathematics literature, well-written, and of interest to a wide audience. All manuscripts will undergo a strict refereeing process; acceptance for publication is based on two positive reviews from experts in the field.Submission of a manuscript acknowledges that the manuscript is original and is not, in whole or in part, published or submitted for publication elsewhere. A copyright agreement is required before the publication of the paper.Manuscripts must be written in English. It is the author''s responsibility to make sure her/his manuscript is written in clear, unambiguous and grammatically correct language.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


