勘误表:“双轴万向节系统的自适应动态表面控制”
IF 1.4
4区 工程技术
Q3 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 4
摘要
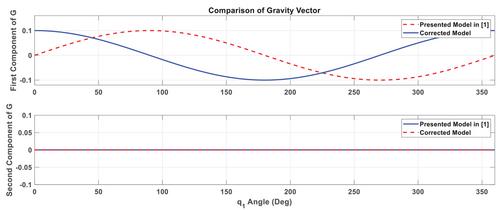
在[1]中,为存在参数不确定性的双轴万向节系统设计了一种自适应动态表面控制器(DSC)。使用李雅普诺夫稳定性分析来保证跟踪误差收敛到所有闭环信号的原点和有界性。本更正的主要目的是指出整个论文中出现的几个错误,这些错误导致所使用的动态模型不准确,并且所提出的控制器无效。应当指出,考虑到本更正中所作的更正,原文件的主要结果仍然有效。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Corrigendum: ‘Adaptive dynamic surface control of a two-axis gimbal system’
An adaptive Dynamic Surface Controller (DSC) is designed for a two-axis gimbal system with actuator dynamics in the presence of parametric uncertainties in [1]. A Lyapunov stability analysis is used to guarantee the convergence of the tracking error to the origin and boundedness of all closed-loop signals. The main objective of this corrigendum is to point out several errors that occurred throughout the paper, resulting in the inaccuracy of the used dynamic model and ineffectiveness of the proposed controller. It should be noted that taking into account the corrections stated in this corrigendum, the main result of the original paper is still valid.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Iet Science Measurement & Technology
工程技术-工程:电子与电气
CiteScore
4.30
自引率
7.10%
发文量
41
审稿时长
7.5 months
期刊介绍:
IET Science, Measurement & Technology publishes papers in science, engineering and technology underpinning electronic and electrical engineering, nanotechnology and medical instrumentation.The emphasis of the journal is on theory, simulation methodologies and measurement techniques.
The major themes of the journal are:
- electromagnetism including electromagnetic theory, computational electromagnetics and EMC
- properties and applications of dielectric, magnetic, magneto-optic, piezoelectric materials down to the nanometre scale
- measurement and instrumentation including sensors, actuators, medical instrumentation, fundamentals of measurement including measurement standards, uncertainty, dissemination and calibration
Applications are welcome for illustrative purposes but the novelty and originality should focus on the proposed new methods.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


