{"title":"基于线性矩阵不等式的边界不确定轮式移动机器人鲁棒模型预测跟踪控制","authors":"Xing Gao, Xin Su, Aimin An, Haochen Zhang","doi":"10.1049/csy2.12086","DOIUrl":null,"url":null,"abstract":"<p>In this study, a robust model predictive controller is designed for the trajectory tracking problem of non-holonomic constrained wheeled mobile robot based on an elliptic invariant set approach. The controller is based on a time-varying error model of robot kinematics and uses linear matrix inequalities to solve the robust tracking problem taking uncertainties into account. The uncertainties are modelled by linear fractional transform form to contain both parameter perturbations and external disturbances. The control strategy consists of a feedforward term that drives the centre of the ellipse to the reference point and a feedback term that converges the uncertain system state error to the equilibrium point. The strategy stabilises the nominal system and ensures that all states of the uncertain system remain within the ellipsoid at each step, thus achieving robust stability of the uncertain system. Finally, the robustness of the algorithm and its resistance to disturbances are verified by simulation and experiment.</p>","PeriodicalId":34110,"journal":{"name":"IET Cybersystems and Robotics","volume":"5 1","pages":""},"PeriodicalIF":1.2000,"publicationDate":"2023-03-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12086","citationCount":"0","resultStr":"{\"title\":\"Robust model predictive tracking control for the wheeled mobile robot with boundary uncertain based on linear matrix inequalities\",\"authors\":\"Xing Gao, Xin Su, Aimin An, Haochen Zhang\",\"doi\":\"10.1049/csy2.12086\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this study, a robust model predictive controller is designed for the trajectory tracking problem of non-holonomic constrained wheeled mobile robot based on an elliptic invariant set approach. The controller is based on a time-varying error model of robot kinematics and uses linear matrix inequalities to solve the robust tracking problem taking uncertainties into account. The uncertainties are modelled by linear fractional transform form to contain both parameter perturbations and external disturbances. The control strategy consists of a feedforward term that drives the centre of the ellipse to the reference point and a feedback term that converges the uncertain system state error to the equilibrium point. The strategy stabilises the nominal system and ensures that all states of the uncertain system remain within the ellipsoid at each step, thus achieving robust stability of the uncertain system. Finally, the robustness of the algorithm and its resistance to disturbances are verified by simulation and experiment.</p>\",\"PeriodicalId\":34110,\"journal\":{\"name\":\"IET Cybersystems and Robotics\",\"volume\":\"5 1\",\"pages\":\"\"},\"PeriodicalIF\":1.2000,\"publicationDate\":\"2023-03-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12086\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Cybersystems and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/csy2.12086\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Cybersystems and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/csy2.12086","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Robust model predictive tracking control for the wheeled mobile robot with boundary uncertain based on linear matrix inequalities
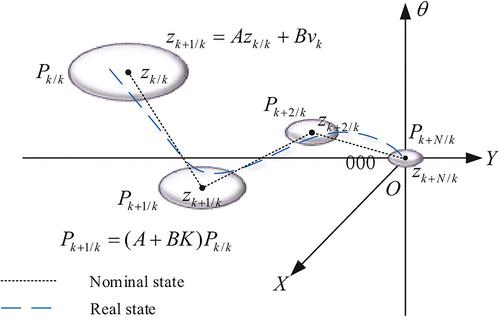
In this study, a robust model predictive controller is designed for the trajectory tracking problem of non-holonomic constrained wheeled mobile robot based on an elliptic invariant set approach. The controller is based on a time-varying error model of robot kinematics and uses linear matrix inequalities to solve the robust tracking problem taking uncertainties into account. The uncertainties are modelled by linear fractional transform form to contain both parameter perturbations and external disturbances. The control strategy consists of a feedforward term that drives the centre of the ellipse to the reference point and a feedback term that converges the uncertain system state error to the equilibrium point. The strategy stabilises the nominal system and ensures that all states of the uncertain system remain within the ellipsoid at each step, thus achieving robust stability of the uncertain system. Finally, the robustness of the algorithm and its resistance to disturbances are verified by simulation and experiment.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


