{"title":"基于管道旋转方案的机器人等离子切割单y槽支管模型驱动路径规划","authors":"Yan Liu, Qiu Tang, Xin-Cheng Tian","doi":"10.1007/s40436-023-00453-1","DOIUrl":null,"url":null,"abstract":"<div><p>The automatic cutting of intersecting pipes is a challenging task in manufacturing. For improved automation and accuracy, this paper proposes a model-driven path planning approach for the robotic plasma cutting of a branch pipe with a single Y-groove. Firstly, it summarizes the intersection forms and introduces a dual-pipe intersection model. Based on this model, the moving three-plane structure (a description unit of the geometric characteristics of the intersecting curve) is constructed, and a geometric model of the branch pipe with a single Y-groove is defined. Secondly, a novel mathematical model for plasma radius and taper compensation is established. Then, the compensation model and groove model are integrated by establishing movable frames. Thirdly, to prevent collisions between the plasma torch and workpiece, the torch height is planned and a branch pipe-rotating scheme is proposed. Through the established models and moving frames, the planned path description of cutting robot is provided in this novel scheme. The accuracy of the proposed method is verified by simulations and robotic cutting experiments.\n</p></div>","PeriodicalId":7342,"journal":{"name":"Advances in Manufacturing","volume":"12 1","pages":"94 - 107"},"PeriodicalIF":4.2000,"publicationDate":"2023-08-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Model-driven path planning for robotic plasma cutting of branch pipe with single Y-groove based on pipe-rotating scheme\",\"authors\":\"Yan Liu, Qiu Tang, Xin-Cheng Tian\",\"doi\":\"10.1007/s40436-023-00453-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>The automatic cutting of intersecting pipes is a challenging task in manufacturing. For improved automation and accuracy, this paper proposes a model-driven path planning approach for the robotic plasma cutting of a branch pipe with a single Y-groove. Firstly, it summarizes the intersection forms and introduces a dual-pipe intersection model. Based on this model, the moving three-plane structure (a description unit of the geometric characteristics of the intersecting curve) is constructed, and a geometric model of the branch pipe with a single Y-groove is defined. Secondly, a novel mathematical model for plasma radius and taper compensation is established. Then, the compensation model and groove model are integrated by establishing movable frames. Thirdly, to prevent collisions between the plasma torch and workpiece, the torch height is planned and a branch pipe-rotating scheme is proposed. Through the established models and moving frames, the planned path description of cutting robot is provided in this novel scheme. The accuracy of the proposed method is verified by simulations and robotic cutting experiments.\\n</p></div>\",\"PeriodicalId\":7342,\"journal\":{\"name\":\"Advances in Manufacturing\",\"volume\":\"12 1\",\"pages\":\"94 - 107\"},\"PeriodicalIF\":4.2000,\"publicationDate\":\"2023-08-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advances in Manufacturing\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s40436-023-00453-1\",\"RegionNum\":2,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MANUFACTURING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advances in Manufacturing","FirstCategoryId":"5","ListUrlMain":"https://link.springer.com/article/10.1007/s40436-023-00453-1","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MANUFACTURING","Score":null,"Total":0}
引用次数: 0
摘要
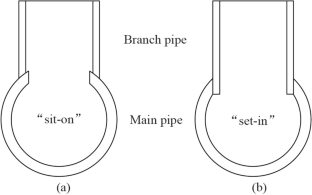
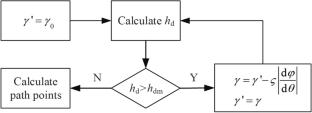
自动切割相交管道是制造业中一项具有挑战性的任务。为了提高自动化程度和精度,本文提出了一种模型驱动的路径规划方法,用于机器人等离子切割带有单 Y 形槽的支管。首先,本文总结了交叉形式,并引入了双管交叉模型。在此基础上,构建了移动三平面结构(相交曲线几何特征的描述单元),并定义了单 Y 形槽支管的几何模型。其次,建立了等离子半径和锥度补偿的新型数学模型。然后,通过建立活动框架将补偿模型和沟槽模型整合在一起。第三,为防止等离子割炬和工件之间的碰撞,规划了割炬高度,并提出了支管旋转方案。通过已建立的模型和移动框架,该新方案提供了切割机器人的规划路径描述。模拟和机器人切割实验验证了所提方法的准确性。
Model-driven path planning for robotic plasma cutting of branch pipe with single Y-groove based on pipe-rotating scheme
The automatic cutting of intersecting pipes is a challenging task in manufacturing. For improved automation and accuracy, this paper proposes a model-driven path planning approach for the robotic plasma cutting of a branch pipe with a single Y-groove. Firstly, it summarizes the intersection forms and introduces a dual-pipe intersection model. Based on this model, the moving three-plane structure (a description unit of the geometric characteristics of the intersecting curve) is constructed, and a geometric model of the branch pipe with a single Y-groove is defined. Secondly, a novel mathematical model for plasma radius and taper compensation is established. Then, the compensation model and groove model are integrated by establishing movable frames. Thirdly, to prevent collisions between the plasma torch and workpiece, the torch height is planned and a branch pipe-rotating scheme is proposed. Through the established models and moving frames, the planned path description of cutting robot is provided in this novel scheme. The accuracy of the proposed method is verified by simulations and robotic cutting experiments.
期刊介绍:
As an innovative, fundamental and scientific journal, Advances in Manufacturing aims to describe the latest regional and global research results and forefront developments in advanced manufacturing field. As such, it serves as an international platform for academic exchange between experts, scholars and researchers in this field.
All articles in Advances in Manufacturing are peer reviewed. Respected scholars from the fields of advanced manufacturing fields will be invited to write some comments. We also encourage and give priority to research papers that have made major breakthroughs or innovations in the fundamental theory. The targeted fields include: manufacturing automation, mechatronics and robotics, precision manufacturing and control, micro-nano-manufacturing, green manufacturing, design in manufacturing, metallic and nonmetallic materials in manufacturing, metallurgical process, etc. The forms of articles include (but not limited to): academic articles, research reports, and general reviews.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


