{"title":"MemoBox:用于微创手术的机械跟踪系统。","authors":"Costanza Culmone, David J Jager, Paul Breedveld","doi":"10.3389/fmedt.2022.938643","DOIUrl":null,"url":null,"abstract":"<p><p>With the increase in Natural Orifice Transluminal Endoscopic Surgery procedures, there is an increasing demand for surgical instruments with additional degrees of freedom, able to travel along tortuous pathways and guarantee dexterity and high accuracy without compromising the surrounding environment. The implementation of follow-the-leader motion in surgical instruments allows propagating the decided shape through its body and moving through curved paths avoiding sensitive areas. Due to the limited operational area and therefore the instrument size, the steerable shaft of these instruments is usually driven by cables that are externally actuated. However, a large number of degrees of freedom requires a great number of actuators, increasing the system complexity. Therefore, our goal was to design a new memory system able to impose a follow-the-leader motion to the steerable shaft of a medical instrument without using actuators. We present a memory mechanism to control and guide the cable displacements of a cable-driven shaft able to move along a multi-curved path. The memory mechanism is based on a programmable physical track with a mechanical interlocking system. The memory system, called MemoBox, was manufactured as a proof-of-concept demonstration model, measuring 70 mm × 64 mm × 6 mm with 11 programmable elements and featuring a minimum resolution of 1 mm. The prototype shows the ability to generate and shift complex 2D pathways in real-time controlled by the user.</p>","PeriodicalId":12599,"journal":{"name":"Frontiers in Medical Technology","volume":" ","pages":"938643"},"PeriodicalIF":0.0000,"publicationDate":"2022-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9632848/pdf/","citationCount":"0","resultStr":"{\"title\":\"MemoBox: A mechanical follow-the-leader system for minimally invasive surgery.\",\"authors\":\"Costanza Culmone, David J Jager, Paul Breedveld\",\"doi\":\"10.3389/fmedt.2022.938643\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>With the increase in Natural Orifice Transluminal Endoscopic Surgery procedures, there is an increasing demand for surgical instruments with additional degrees of freedom, able to travel along tortuous pathways and guarantee dexterity and high accuracy without compromising the surrounding environment. The implementation of follow-the-leader motion in surgical instruments allows propagating the decided shape through its body and moving through curved paths avoiding sensitive areas. Due to the limited operational area and therefore the instrument size, the steerable shaft of these instruments is usually driven by cables that are externally actuated. However, a large number of degrees of freedom requires a great number of actuators, increasing the system complexity. Therefore, our goal was to design a new memory system able to impose a follow-the-leader motion to the steerable shaft of a medical instrument without using actuators. We present a memory mechanism to control and guide the cable displacements of a cable-driven shaft able to move along a multi-curved path. The memory mechanism is based on a programmable physical track with a mechanical interlocking system. The memory system, called MemoBox, was manufactured as a proof-of-concept demonstration model, measuring 70 mm × 64 mm × 6 mm with 11 programmable elements and featuring a minimum resolution of 1 mm. The prototype shows the ability to generate and shift complex 2D pathways in real-time controlled by the user.</p>\",\"PeriodicalId\":12599,\"journal\":{\"name\":\"Frontiers in Medical Technology\",\"volume\":\" \",\"pages\":\"938643\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2022-09-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9632848/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Medical Technology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/fmedt.2022.938643\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2022/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Medical Technology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/fmedt.2022.938643","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/1/1 0:00:00","PubModel":"eCollection","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
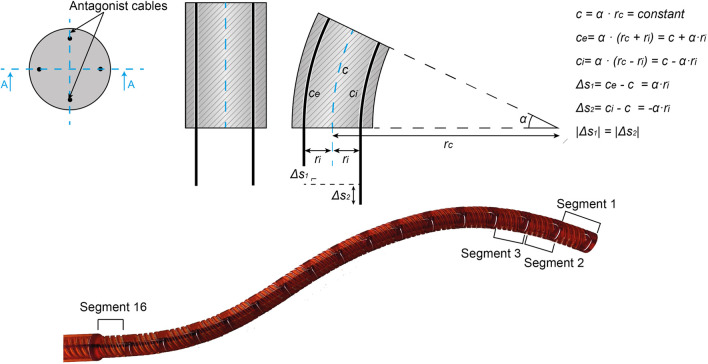
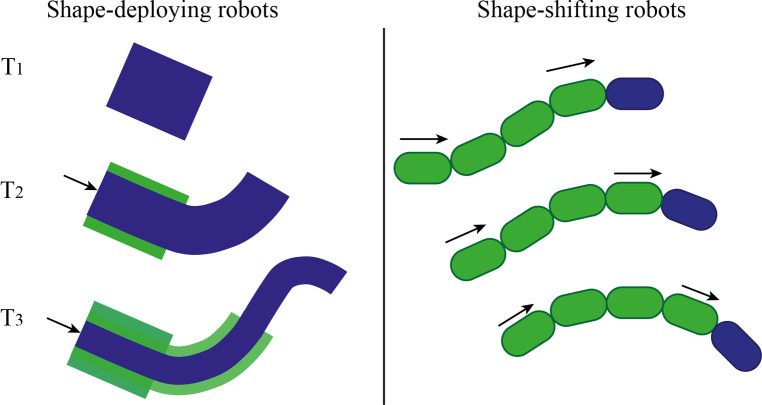
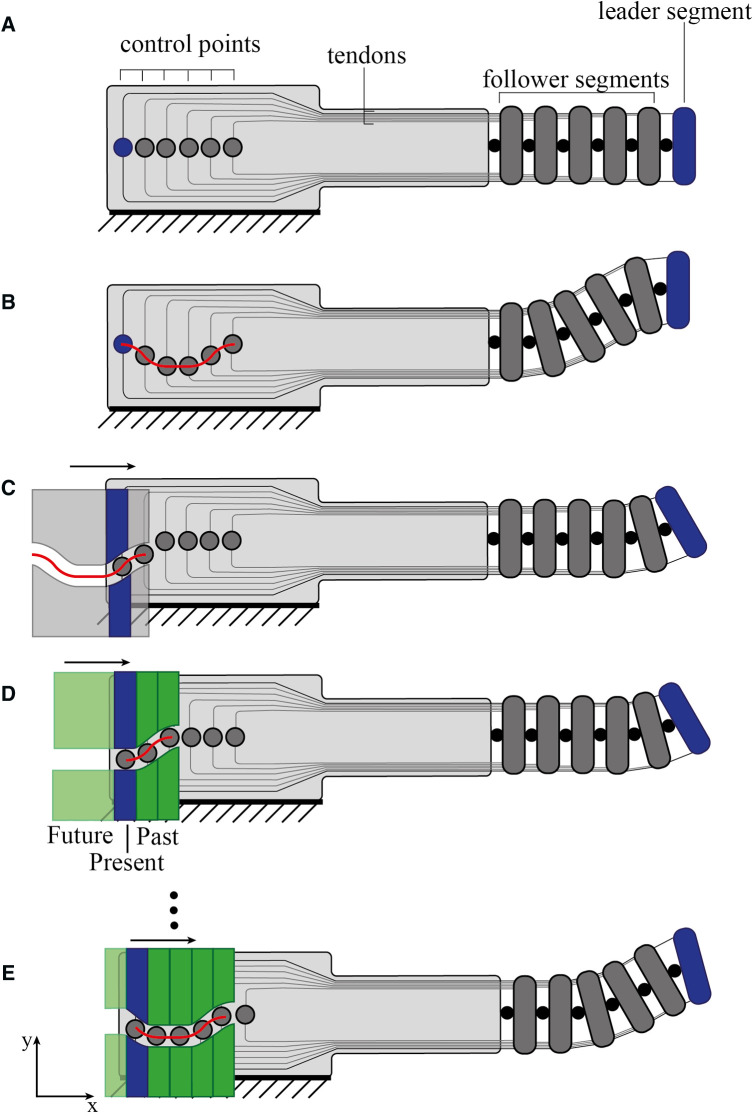
随着自然孔腔内窥镜手术程序的增加,对具有额外自由度的手术器械的需求不断增加,这些手术器械能够沿着弯曲的路径行进,并保证灵活性和高精度,而不会影响周围环境。在手术器械中实现随导运动,可以通过其身体传播确定的形状,并通过弯曲的路径移动,避免敏感区域。由于有限的操作区域和仪器尺寸,这些仪器的可转向轴通常由外部驱动的电缆驱动。然而,大量的自由度需要大量的执行机构,增加了系统的复杂性。因此,我们的目标是设计一种新的记忆系统,能够在不使用致动器的情况下对医疗器械的可操纵轴施加跟随运动。我们提出了一种记忆机制来控制和引导能够沿着多曲线路径移动的电缆驱动轴的电缆位移。存储机构是基于一个可编程的物理轨道与机械联锁系统。该存储系统被称为MemoBox,是作为概念验证演示模型制造的,尺寸为70 mm × 64 mm × 6 mm,具有11个可编程元件,最小分辨率为1 mm。该原型显示了由用户实时控制生成和移动复杂2D路径的能力。
MemoBox: A mechanical follow-the-leader system for minimally invasive surgery.
With the increase in Natural Orifice Transluminal Endoscopic Surgery procedures, there is an increasing demand for surgical instruments with additional degrees of freedom, able to travel along tortuous pathways and guarantee dexterity and high accuracy without compromising the surrounding environment. The implementation of follow-the-leader motion in surgical instruments allows propagating the decided shape through its body and moving through curved paths avoiding sensitive areas. Due to the limited operational area and therefore the instrument size, the steerable shaft of these instruments is usually driven by cables that are externally actuated. However, a large number of degrees of freedom requires a great number of actuators, increasing the system complexity. Therefore, our goal was to design a new memory system able to impose a follow-the-leader motion to the steerable shaft of a medical instrument without using actuators. We present a memory mechanism to control and guide the cable displacements of a cable-driven shaft able to move along a multi-curved path. The memory mechanism is based on a programmable physical track with a mechanical interlocking system. The memory system, called MemoBox, was manufactured as a proof-of-concept demonstration model, measuring 70 mm × 64 mm × 6 mm with 11 programmable elements and featuring a minimum resolution of 1 mm. The prototype shows the ability to generate and shift complex 2D pathways in real-time controlled by the user.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


