{"title":"在跑步机运动中使用一阶和二阶模型控制心率。","authors":"Hanjie Wang, Kenneth J Hunt","doi":"10.1080/21642583.2021.1976304","DOIUrl":null,"url":null,"abstract":"<p><p>Heart rate control using first- and second-order models was compared using a novel control design strategy which shapes the input sensitivity function. Ten participants performed two feedback control test series on a treadmill with square wave and constant references. Using a repeated measures, counterbalanced study design, each series compared controllers C1 and C2 based on first- and second-order models, respectively. In the first series, tracking accuracy root-mean-square tracking error (RMSE) was not significantly lower for C2: 2.59 bpm vs. 2.69 bpm (mean, C1 vs. C2), <i>p</i> = 0.79. But average control signal power was significantly higher for C2: <math><mn>11.29</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> vs. <math><mn>27.91</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> , <math><mi>p</mi> <mo>=</mo> <mn>3.1</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>10</mn></mrow> </msup> </math> . In the second series, RMSE was also not significantly lower for C2: 1.99 bpm vs. 1.94 bpm, <i>p</i> = 0.39; but average control signal power was again significantly higher for C2: <math><mn>2.20</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> vs. <math><mn>2.78</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> , <i>p</i> = 0.045. The results provide no evidence that controllers based on second-order models lead to better tracking accuracy, despite the finding that they are significantly more dynamic. Further investigation using a substantially larger sample size is warranted.</p>","PeriodicalId":46282,"journal":{"name":"Systems Science & Control Engineering","volume":"9 1","pages":"651-662"},"PeriodicalIF":4.4000,"publicationDate":"2021-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/95/34/TSSC_9_1976304.PMC8494276.pdf","citationCount":"6","resultStr":"{\"title\":\"Heart rate control using first- and second-order models during treadmill exercise.\",\"authors\":\"Hanjie Wang, Kenneth J Hunt\",\"doi\":\"10.1080/21642583.2021.1976304\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Heart rate control using first- and second-order models was compared using a novel control design strategy which shapes the input sensitivity function. Ten participants performed two feedback control test series on a treadmill with square wave and constant references. Using a repeated measures, counterbalanced study design, each series compared controllers C1 and C2 based on first- and second-order models, respectively. In the first series, tracking accuracy root-mean-square tracking error (RMSE) was not significantly lower for C2: 2.59 bpm vs. 2.69 bpm (mean, C1 vs. C2), <i>p</i> = 0.79. But average control signal power was significantly higher for C2: <math><mn>11.29</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> vs. <math><mn>27.91</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> , <math><mi>p</mi> <mo>=</mo> <mn>3.1</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>10</mn></mrow> </msup> </math> . In the second series, RMSE was also not significantly lower for C2: 1.99 bpm vs. 1.94 bpm, <i>p</i> = 0.39; but average control signal power was again significantly higher for C2: <math><mn>2.20</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> vs. <math><mn>2.78</mn> <mo>×</mo> <msup><mn>10</mn> <mrow><mo>-</mo> <mn>4</mn></mrow> </msup> <mspace></mspace> <msup><mrow><mi>m</mi></mrow> <mn>2</mn></msup> <mrow><mo>/</mo></mrow> <msup><mrow><mi>s</mi></mrow> <mn>2</mn></msup> </math> , <i>p</i> = 0.045. The results provide no evidence that controllers based on second-order models lead to better tracking accuracy, despite the finding that they are significantly more dynamic. Further investigation using a substantially larger sample size is warranted.</p>\",\"PeriodicalId\":46282,\"journal\":{\"name\":\"Systems Science & Control Engineering\",\"volume\":\"9 1\",\"pages\":\"651-662\"},\"PeriodicalIF\":4.4000,\"publicationDate\":\"2021-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/95/34/TSSC_9_1976304.PMC8494276.pdf\",\"citationCount\":\"6\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Systems Science & Control Engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1080/21642583.2021.1976304\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2021/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Systems Science & Control Engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1080/21642583.2021.1976304","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2021/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 6
摘要
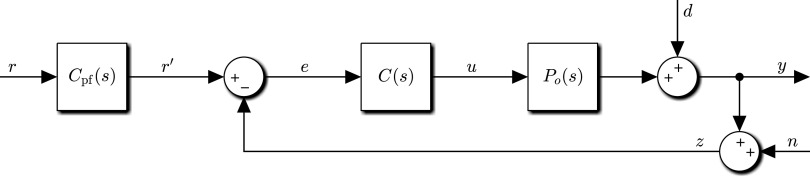
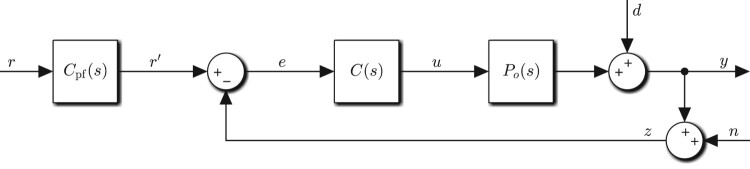
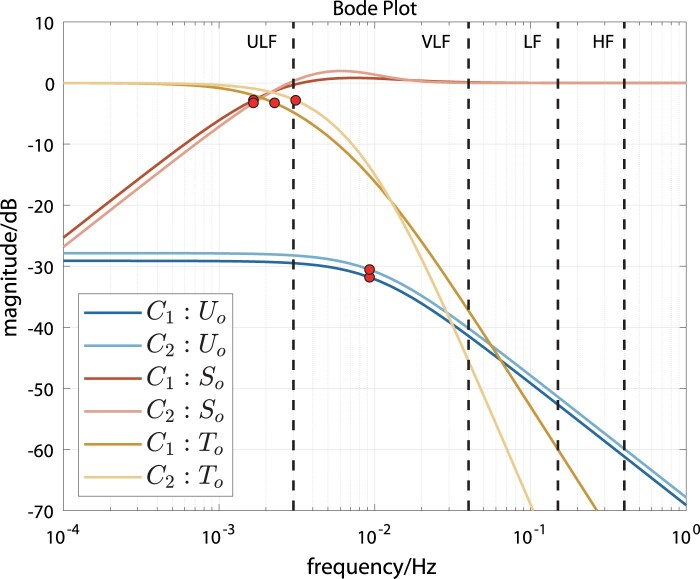
采用一种新的控制设计策略,对一阶和二阶模型的心率控制进行了比较。10名参与者在跑步机上分别进行了方波和恒定参考的两组反馈控制测试。使用重复测量,平衡研究设计,每个系列分别基于一阶和二阶模型比较控制器C1和C2。在第一个系列中,C2的跟踪精度均方根跟踪误差(RMSE)并没有显著降低:2.59 bpm vs. 2.69 bpm(平均值,C1 vs. C2), p = 0.79。C2组的平均控制信号功率为11.29 × 10 - 4 m2 / s 2,显著高于27.91 × 10 - 4 m2 / s 2, p = 3.1 × 10 - 10。在第二个系列中,C2的RMSE也没有显著降低:1.99 bpm对1.94 bpm, p = 0.39;但C2组的平均控制信号功率也显著高于对照组:2.20 × 10 - 4 m2 / s 2 vs. 2.78 × 10 - 4 m2 / s 2, p = 0.045。结果没有提供证据表明基于二阶模型的控制器可以带来更好的跟踪精度,尽管发现它们明显更具动态性。有必要使用更大的样本量进行进一步调查。
Heart rate control using first- and second-order models during treadmill exercise.
Heart rate control using first- and second-order models was compared using a novel control design strategy which shapes the input sensitivity function. Ten participants performed two feedback control test series on a treadmill with square wave and constant references. Using a repeated measures, counterbalanced study design, each series compared controllers C1 and C2 based on first- and second-order models, respectively. In the first series, tracking accuracy root-mean-square tracking error (RMSE) was not significantly lower for C2: 2.59 bpm vs. 2.69 bpm (mean, C1 vs. C2), p = 0.79. But average control signal power was significantly higher for C2: vs. , . In the second series, RMSE was also not significantly lower for C2: 1.99 bpm vs. 1.94 bpm, p = 0.39; but average control signal power was again significantly higher for C2: vs. , p = 0.045. The results provide no evidence that controllers based on second-order models lead to better tracking accuracy, despite the finding that they are significantly more dynamic. Further investigation using a substantially larger sample size is warranted.
期刊介绍:
Systems Science & Control Engineering is a world-leading fully open access journal covering all areas of theoretical and applied systems science and control engineering. The journal encourages the submission of original articles, reviews and short communications in areas including, but not limited to: · artificial intelligence · complex systems · complex networks · control theory · control applications · cybernetics · dynamical systems theory · operations research · systems biology · systems dynamics · systems ecology · systems engineering · systems psychology · systems theory

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


