Md Muhaimin Rahman, S M Hasanur Rashid, M M Hossain
{"title":"Q学习和深度Q网络控制自平衡机器人模型的实现。","authors":"Md Muhaimin Rahman, S M Hasanur Rashid, M M Hossain","doi":"10.1186/s40638-018-0091-9","DOIUrl":null,"url":null,"abstract":"<p><p>In this paper, the implementations of two reinforcement learnings namely, Q learning and deep Q network (DQN) on the Gazebo model of a self balancing robot have been discussed. The goal of the experiments is to make the robot model learn the best actions for staying balanced in an environment. The more time it can remain within a specified limit, the more reward it accumulates and hence more balanced it is. We did various tests with many hyperparameters and demonstrated the performance curves.</p>","PeriodicalId":90966,"journal":{"name":"Robotics and biomimetics","volume":"5 1","pages":"8"},"PeriodicalIF":0.0000,"publicationDate":"2018-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s40638-018-0091-9","citationCount":"28","resultStr":"{\"title\":\"Implementation of Q learning and deep Q network for controlling a self balancing robot model.\",\"authors\":\"Md Muhaimin Rahman, S M Hasanur Rashid, M M Hossain\",\"doi\":\"10.1186/s40638-018-0091-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In this paper, the implementations of two reinforcement learnings namely, Q learning and deep Q network (DQN) on the Gazebo model of a self balancing robot have been discussed. The goal of the experiments is to make the robot model learn the best actions for staying balanced in an environment. The more time it can remain within a specified limit, the more reward it accumulates and hence more balanced it is. We did various tests with many hyperparameters and demonstrated the performance curves.</p>\",\"PeriodicalId\":90966,\"journal\":{\"name\":\"Robotics and biomimetics\",\"volume\":\"5 1\",\"pages\":\"8\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2018-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1186/s40638-018-0091-9\",\"citationCount\":\"28\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Robotics and biomimetics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s40638-018-0091-9\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2018/12/21 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and biomimetics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s40638-018-0091-9","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2018/12/21 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Implementation of Q learning and deep Q network for controlling a self balancing robot model.
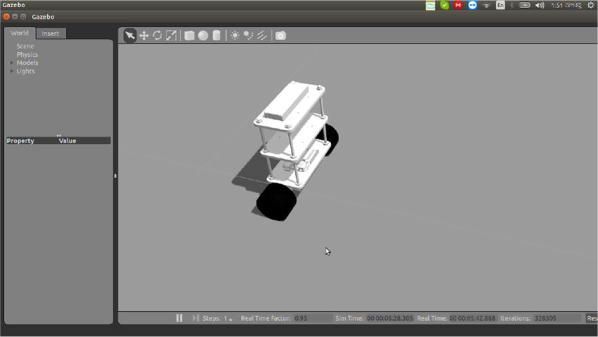
In this paper, the implementations of two reinforcement learnings namely, Q learning and deep Q network (DQN) on the Gazebo model of a self balancing robot have been discussed. The goal of the experiments is to make the robot model learn the best actions for staying balanced in an environment. The more time it can remain within a specified limit, the more reward it accumulates and hence more balanced it is. We did various tests with many hyperparameters and demonstrated the performance curves.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


