{"title":"一种多关节的欠驱动机械手,带有流体驱动的可拉伸管。","authors":"Yuangen Wei, Yini Ma, Wenzeng Zhang","doi":"10.1186/s40638-018-0086-6","DOIUrl":null,"url":null,"abstract":"<p><p>Inspired from flexible bending of octopus' tentacles and outside-driving kind of traditional exoskeletons, this paper proposed a novel self-adaptive underactuated finger mechanism, called OS finger. OS finger is similar to an octopus' tentacle and consists of an artificial muscle which is through all joints and driven by fluid, eight serial-hinged joints, and force-changeable assembly. The force-changeable assembly is mainly composed of a spring and elastic rubber membrane, which is coordinated for stable grasping by a layer of rubber material in the surface of the finger. OS finger can execute different grasping modes depending on the shapes and dimensions of the grasped objects and grip objects in a gentle and form-fitting manner. The OS finger combines good qualities of both rigid grasp of traditional fingers and form-fitting grasp of flexible fingers. Kinematic analysis and experimental results show that the OS robot Hand with four OS fingers is valid for precise pinching, self-adaptive powerful encompassing, and grasping forces that are freely changeable in a wide range. With the advantage of high self-adaptation, various grasp configurations and large range of grasping forces, the OS Hand has a wide range of applications in the area of service robotics which requires a lot of flexible operations of general grasping, moving and releasing.</p>","PeriodicalId":90966,"journal":{"name":"Robotics and biomimetics","volume":"5 1","pages":"2"},"PeriodicalIF":0.0000,"publicationDate":"2018-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s40638-018-0086-6","citationCount":"6","resultStr":"{\"title\":\"A multi-jointed underactuated robot hand with fluid-driven stretchable tubes.\",\"authors\":\"Yuangen Wei, Yini Ma, Wenzeng Zhang\",\"doi\":\"10.1186/s40638-018-0086-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Inspired from flexible bending of octopus' tentacles and outside-driving kind of traditional exoskeletons, this paper proposed a novel self-adaptive underactuated finger mechanism, called OS finger. OS finger is similar to an octopus' tentacle and consists of an artificial muscle which is through all joints and driven by fluid, eight serial-hinged joints, and force-changeable assembly. The force-changeable assembly is mainly composed of a spring and elastic rubber membrane, which is coordinated for stable grasping by a layer of rubber material in the surface of the finger. OS finger can execute different grasping modes depending on the shapes and dimensions of the grasped objects and grip objects in a gentle and form-fitting manner. The OS finger combines good qualities of both rigid grasp of traditional fingers and form-fitting grasp of flexible fingers. Kinematic analysis and experimental results show that the OS robot Hand with four OS fingers is valid for precise pinching, self-adaptive powerful encompassing, and grasping forces that are freely changeable in a wide range. With the advantage of high self-adaptation, various grasp configurations and large range of grasping forces, the OS Hand has a wide range of applications in the area of service robotics which requires a lot of flexible operations of general grasping, moving and releasing.</p>\",\"PeriodicalId\":90966,\"journal\":{\"name\":\"Robotics and biomimetics\",\"volume\":\"5 1\",\"pages\":\"2\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2018-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1186/s40638-018-0086-6\",\"citationCount\":\"6\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Robotics and biomimetics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s40638-018-0086-6\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2018/6/20 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and biomimetics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s40638-018-0086-6","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2018/6/20 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
A multi-jointed underactuated robot hand with fluid-driven stretchable tubes.
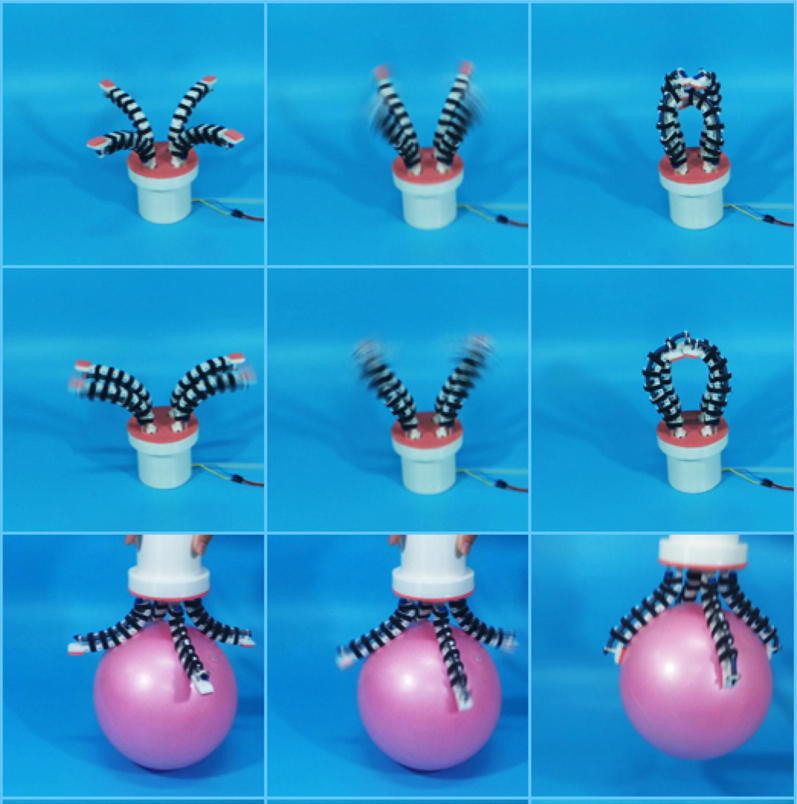
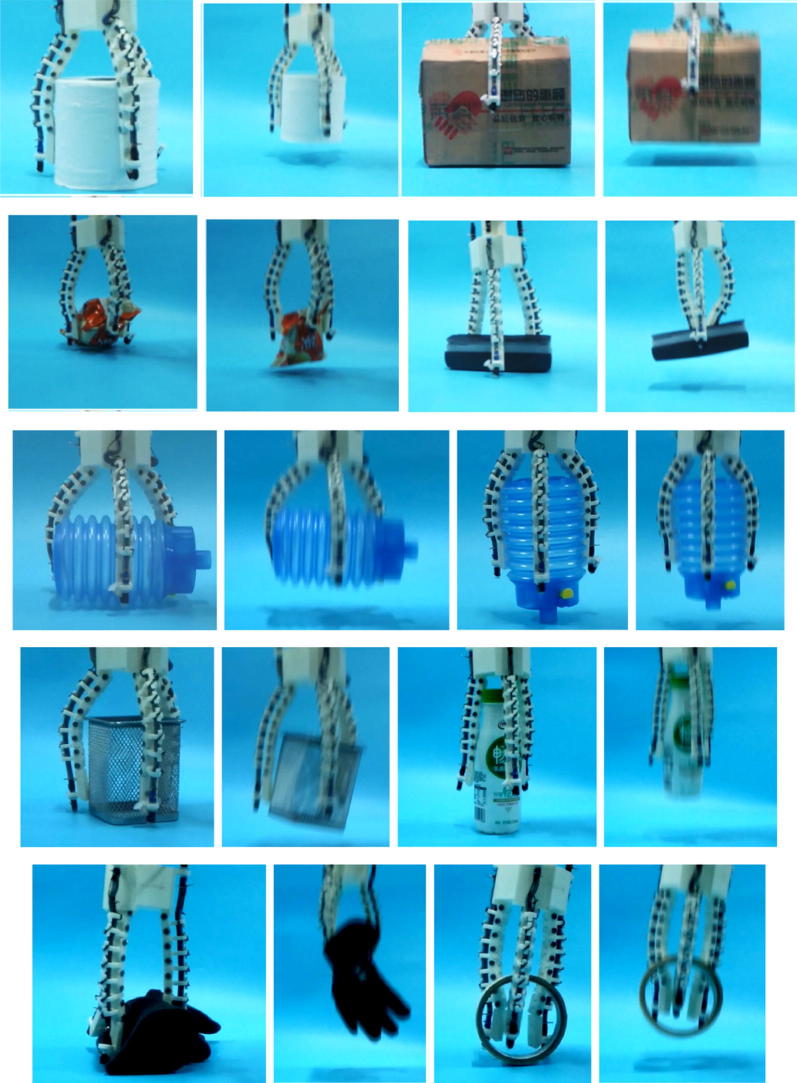
Inspired from flexible bending of octopus' tentacles and outside-driving kind of traditional exoskeletons, this paper proposed a novel self-adaptive underactuated finger mechanism, called OS finger. OS finger is similar to an octopus' tentacle and consists of an artificial muscle which is through all joints and driven by fluid, eight serial-hinged joints, and force-changeable assembly. The force-changeable assembly is mainly composed of a spring and elastic rubber membrane, which is coordinated for stable grasping by a layer of rubber material in the surface of the finger. OS finger can execute different grasping modes depending on the shapes and dimensions of the grasped objects and grip objects in a gentle and form-fitting manner. The OS finger combines good qualities of both rigid grasp of traditional fingers and form-fitting grasp of flexible fingers. Kinematic analysis and experimental results show that the OS robot Hand with four OS fingers is valid for precise pinching, self-adaptive powerful encompassing, and grasping forces that are freely changeable in a wide range. With the advantage of high self-adaptation, various grasp configurations and large range of grasping forces, the OS Hand has a wide range of applications in the area of service robotics which requires a lot of flexible operations of general grasping, moving and releasing.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


