{"title":"机器人超声:初步可行性研究。","authors":"Sheragaru Hanumanthappa Chandrashekhara, Krithika Rangarajan, Ayushi Agrawal, Sanjay Thulkar, Shivanand Gamanagatti, Deepak Raina, Subir Kumar Saha, Chetan Arora","doi":"10.5662/wjm.v12.i4.274","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Performing ultrasound during the current pandemic time is quite challenging. To reduce the chances of cross-infection and keep healthcare workers safe, a robotic ultrasound system was developed, which can be controlled remotely. It will also pave way for broadening the reach of ultrasound in remote distant rural areas as well.</p><p><strong>Aim: </strong>To assess the feasibility of a robotic system in performing abdominal ultrasound and compare it with the conventional ultrasound system.</p><p><strong>Methods: </strong>A total of 21 healthy volunteers were recruited. Ultrasound was performed in two settings, using the robotic arm and conventional hand-held procedure. Images acquired were analyzed by separate radiologists.</p><p><strong>Results: </strong>Our study showed that the robotic arm model was feasible, and the results varied based on the organ imaged. The liver images showed no significant difference. For other organs, the need for repeat imaging was higher in the robotic arm, which could be attributed to the radiologist's learning curve and ability to control the haptic device. The doctor and volunteer surveys also showed significant comfort with acceptance of the technology and they expressed their desire to use it in the future.</p><p><strong>Conclusion: </strong>This study shows that robotic ultrasound is feasible and is the need of the hour during the pandemic.</p>","PeriodicalId":23729,"journal":{"name":"World journal of methodology","volume":"12 4","pages":"274-284"},"PeriodicalIF":0.0000,"publicationDate":"2022-07-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/0d/8d/WJM-12-274.PMC9350722.pdf","citationCount":"6","resultStr":"{\"title\":\"Robotic ultrasound: An initial feasibility study.\",\"authors\":\"Sheragaru Hanumanthappa Chandrashekhara, Krithika Rangarajan, Ayushi Agrawal, Sanjay Thulkar, Shivanand Gamanagatti, Deepak Raina, Subir Kumar Saha, Chetan Arora\",\"doi\":\"10.5662/wjm.v12.i4.274\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Performing ultrasound during the current pandemic time is quite challenging. To reduce the chances of cross-infection and keep healthcare workers safe, a robotic ultrasound system was developed, which can be controlled remotely. It will also pave way for broadening the reach of ultrasound in remote distant rural areas as well.</p><p><strong>Aim: </strong>To assess the feasibility of a robotic system in performing abdominal ultrasound and compare it with the conventional ultrasound system.</p><p><strong>Methods: </strong>A total of 21 healthy volunteers were recruited. Ultrasound was performed in two settings, using the robotic arm and conventional hand-held procedure. Images acquired were analyzed by separate radiologists.</p><p><strong>Results: </strong>Our study showed that the robotic arm model was feasible, and the results varied based on the organ imaged. The liver images showed no significant difference. For other organs, the need for repeat imaging was higher in the robotic arm, which could be attributed to the radiologist's learning curve and ability to control the haptic device. The doctor and volunteer surveys also showed significant comfort with acceptance of the technology and they expressed their desire to use it in the future.</p><p><strong>Conclusion: </strong>This study shows that robotic ultrasound is feasible and is the need of the hour during the pandemic.</p>\",\"PeriodicalId\":23729,\"journal\":{\"name\":\"World journal of methodology\",\"volume\":\"12 4\",\"pages\":\"274-284\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2022-07-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/0d/8d/WJM-12-274.PMC9350722.pdf\",\"citationCount\":\"6\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"World journal of methodology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.5662/wjm.v12.i4.274\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"World journal of methodology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.5662/wjm.v12.i4.274","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
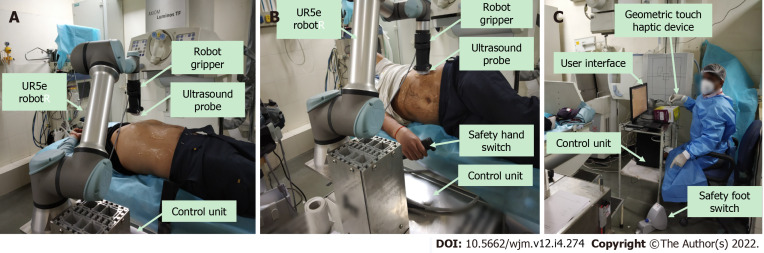
Background: Performing ultrasound during the current pandemic time is quite challenging. To reduce the chances of cross-infection and keep healthcare workers safe, a robotic ultrasound system was developed, which can be controlled remotely. It will also pave way for broadening the reach of ultrasound in remote distant rural areas as well.
Aim: To assess the feasibility of a robotic system in performing abdominal ultrasound and compare it with the conventional ultrasound system.
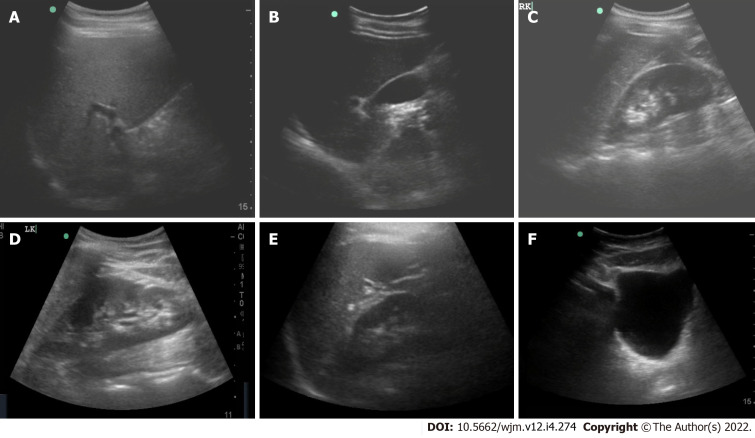
Methods: A total of 21 healthy volunteers were recruited. Ultrasound was performed in two settings, using the robotic arm and conventional hand-held procedure. Images acquired were analyzed by separate radiologists.
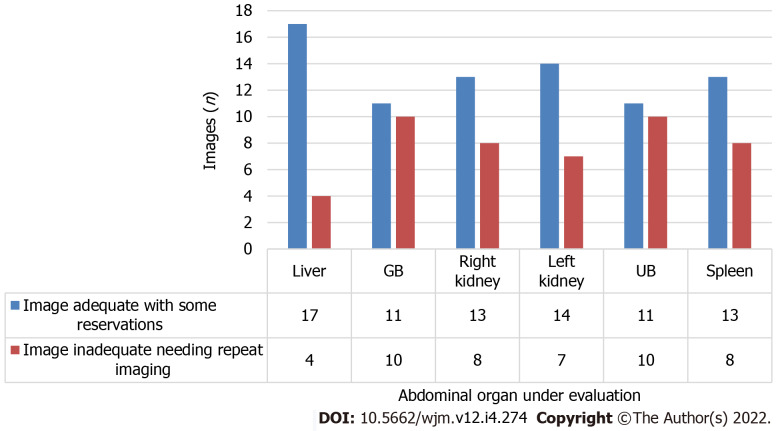
Results: Our study showed that the robotic arm model was feasible, and the results varied based on the organ imaged. The liver images showed no significant difference. For other organs, the need for repeat imaging was higher in the robotic arm, which could be attributed to the radiologist's learning curve and ability to control the haptic device. The doctor and volunteer surveys also showed significant comfort with acceptance of the technology and they expressed their desire to use it in the future.
Conclusion: This study shows that robotic ultrasound is feasible and is the need of the hour during the pandemic.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


