{"title":"一种基于人工神经网络的手部力估计比较方法。","authors":"Farid Mobasser, Keyvan Hashtrudi-Zaad","doi":"10.4137/BECB.S9335","DOIUrl":null,"url":null,"abstract":"<p><p>In many applications that include direct human involvement such as control of prosthetic arms, athletic training, and studying muscle physiology, hand force is needed for control, modeling and monitoring purposes. The use of inexpensive and easily portable active electromyography (EMG) electrodes and position sensors would be advantageous in these applications compared to the use of force sensors which are often very expensive and require bulky frames. Among non-model-based estimation methods, Multilayer Perceptron Artificial Neural Networks (MLPANN) has widely been used to estimate muscle force or joint torque from different anatomical features in humans or animals. This paper investigates the use of Radial Basis Function (RBF) ANN and MLPANN for force estimation and experimentally compares the performance of the two methodologies for the same human anatomy, ie, hand force estimation, under an ensemble of operational conditions. In this unified study, the EMG signal readings from upper-arm muscles involved in elbow joint movement and elbow angular position and velocity are utilized as inputs to the ANNs. In addition, the use of the elbow angular acceleration signal as an input for the ANNs is also investigated. </p>","PeriodicalId":42484,"journal":{"name":"Biomedical Engineering and Computational Biology","volume":"4 ","pages":"1-15"},"PeriodicalIF":3.1000,"publicationDate":"2012-07-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.4137/BECB.S9335","citationCount":"23","resultStr":"{\"title\":\"A Comparative Approach to Hand Force Estimation using Artificial Neural Networks.\",\"authors\":\"Farid Mobasser, Keyvan Hashtrudi-Zaad\",\"doi\":\"10.4137/BECB.S9335\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In many applications that include direct human involvement such as control of prosthetic arms, athletic training, and studying muscle physiology, hand force is needed for control, modeling and monitoring purposes. The use of inexpensive and easily portable active electromyography (EMG) electrodes and position sensors would be advantageous in these applications compared to the use of force sensors which are often very expensive and require bulky frames. Among non-model-based estimation methods, Multilayer Perceptron Artificial Neural Networks (MLPANN) has widely been used to estimate muscle force or joint torque from different anatomical features in humans or animals. This paper investigates the use of Radial Basis Function (RBF) ANN and MLPANN for force estimation and experimentally compares the performance of the two methodologies for the same human anatomy, ie, hand force estimation, under an ensemble of operational conditions. In this unified study, the EMG signal readings from upper-arm muscles involved in elbow joint movement and elbow angular position and velocity are utilized as inputs to the ANNs. In addition, the use of the elbow angular acceleration signal as an input for the ANNs is also investigated. </p>\",\"PeriodicalId\":42484,\"journal\":{\"name\":\"Biomedical Engineering and Computational Biology\",\"volume\":\"4 \",\"pages\":\"1-15\"},\"PeriodicalIF\":3.1000,\"publicationDate\":\"2012-07-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.4137/BECB.S9335\",\"citationCount\":\"23\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomedical Engineering and Computational Biology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.4137/BECB.S9335\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2012/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomedical Engineering and Computational Biology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.4137/BECB.S9335","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2012/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
A Comparative Approach to Hand Force Estimation using Artificial Neural Networks.
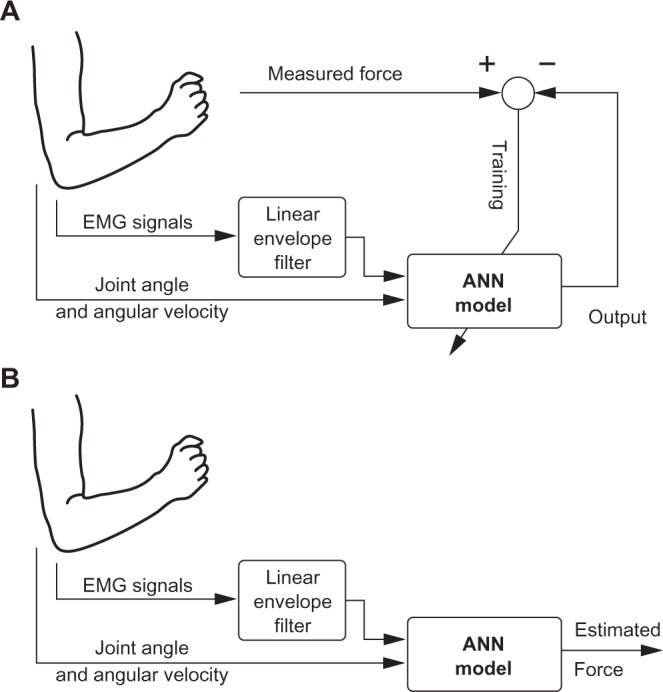
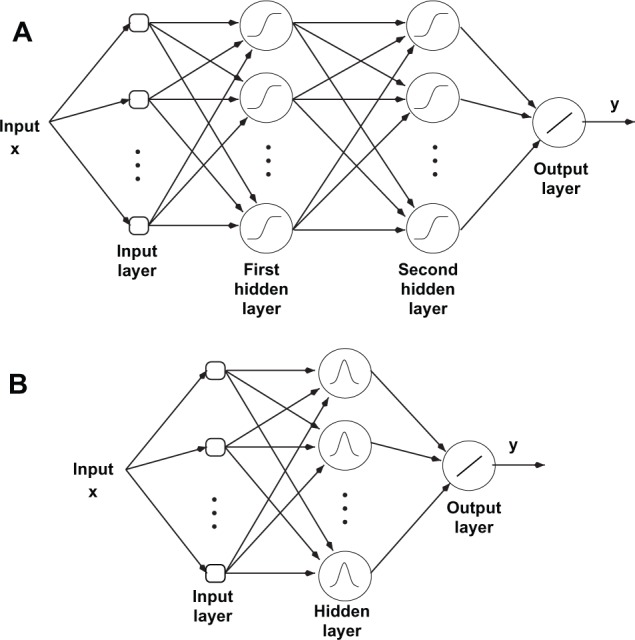
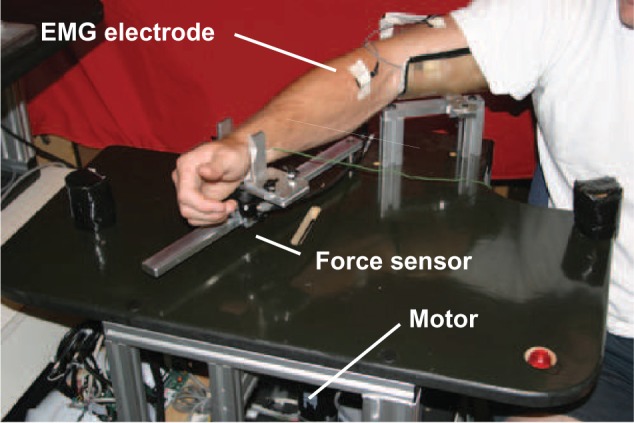
In many applications that include direct human involvement such as control of prosthetic arms, athletic training, and studying muscle physiology, hand force is needed for control, modeling and monitoring purposes. The use of inexpensive and easily portable active electromyography (EMG) electrodes and position sensors would be advantageous in these applications compared to the use of force sensors which are often very expensive and require bulky frames. Among non-model-based estimation methods, Multilayer Perceptron Artificial Neural Networks (MLPANN) has widely been used to estimate muscle force or joint torque from different anatomical features in humans or animals. This paper investigates the use of Radial Basis Function (RBF) ANN and MLPANN for force estimation and experimentally compares the performance of the two methodologies for the same human anatomy, ie, hand force estimation, under an ensemble of operational conditions. In this unified study, the EMG signal readings from upper-arm muscles involved in elbow joint movement and elbow angular position and velocity are utilized as inputs to the ANNs. In addition, the use of the elbow angular acceleration signal as an input for the ANNs is also investigated.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


