Meghan C Crookshank, Maarten Beek, Michael R Hardisty, Emil H Schemitsch, Cari M Whyne
{"title":"基于三维地图集的配准可以在六自由度内计算股骨干骨折的不对中。","authors":"Meghan C Crookshank, Maarten Beek, Michael R Hardisty, Emil H Schemitsch, Cari M Whyne","doi":"10.3109/10929088.2014.894126","DOIUrl":null,"url":null,"abstract":"<p><strong>Objective: </strong>This study presents and evaluates a semi-automated algorithm for quantifying malalignment in complex femoral shaft fractures from a single intraoperative cone-beam CT (CBCT) image of the fractured limb.</p><p><strong>Methods: </strong>CBCT images were acquired of complex comminuted diaphyseal fractures created in 9 cadaveric femora (27 cases). Scans were segmented using intensity-based thresholding, yielding image stacks of the proximal, distal and comminuted bone. Semi-deformable and rigid affine registrations to an intact femur atlas (synthetic or cadaveric-based) were performed to transform the distal fragment to its neutral alignment. Leg length was calculated from the volume of bone within the comminution fragment. The transformations were compared to the physical input malalignments.</p><p><strong>Results: </strong>Using the synthetic atlas, translations were within 1.71 ± 1.08 mm (medial/lateral) and 2.24 ± 2.11 mm (anterior/posterior). The varus/valgus, flexion/extension and periaxial rotation errors were 3.45 ± 2.6°, 1.86 ± 1.5° and 3.4 ± 2.0°, respectively. The cadaveric-based atlas yielded similar results in medial/lateral and anterior/posterior translation (1.73 ± 1.28 mm and 2.15 ± 2.13 mm, respectively). Varus/valgus, flexion/extension and periaxial rotation errors were 2.3 ± 1.3°, 2.0 ± 1.6° and 3.4 ± 2.0°, respectively. Leg length errors were 1.41 ± 1.01 mm (synthetic) and 1.26 ± 0.94 mm (cadaveric). The cadaveric model demonstrated a small improvement in flexion/extension and the synthetic atlas performed slightly faster (6 min 24 s ± 50 s versus 8 min 42 s ± 2 min 25 s).</p><p><strong>Conclusions: </strong>This atlas-based algorithm quantified malalignment in complex femoral shaft fractures within clinical tolerances from a single CBCT image of the fractured limb.</p>","PeriodicalId":50644,"journal":{"name":"Computer Aided Surgery","volume":"19 1-3","pages":"48-56"},"PeriodicalIF":0.0000,"publicationDate":"2014-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.3109/10929088.2014.894126","citationCount":"2","resultStr":"{\"title\":\"3D atlas-based registration can calculate malalignment of femoral shaft fractures in six degrees of freedom.\",\"authors\":\"Meghan C Crookshank, Maarten Beek, Michael R Hardisty, Emil H Schemitsch, Cari M Whyne\",\"doi\":\"10.3109/10929088.2014.894126\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Objective: </strong>This study presents and evaluates a semi-automated algorithm for quantifying malalignment in complex femoral shaft fractures from a single intraoperative cone-beam CT (CBCT) image of the fractured limb.</p><p><strong>Methods: </strong>CBCT images were acquired of complex comminuted diaphyseal fractures created in 9 cadaveric femora (27 cases). Scans were segmented using intensity-based thresholding, yielding image stacks of the proximal, distal and comminuted bone. Semi-deformable and rigid affine registrations to an intact femur atlas (synthetic or cadaveric-based) were performed to transform the distal fragment to its neutral alignment. Leg length was calculated from the volume of bone within the comminution fragment. The transformations were compared to the physical input malalignments.</p><p><strong>Results: </strong>Using the synthetic atlas, translations were within 1.71 ± 1.08 mm (medial/lateral) and 2.24 ± 2.11 mm (anterior/posterior). The varus/valgus, flexion/extension and periaxial rotation errors were 3.45 ± 2.6°, 1.86 ± 1.5° and 3.4 ± 2.0°, respectively. The cadaveric-based atlas yielded similar results in medial/lateral and anterior/posterior translation (1.73 ± 1.28 mm and 2.15 ± 2.13 mm, respectively). Varus/valgus, flexion/extension and periaxial rotation errors were 2.3 ± 1.3°, 2.0 ± 1.6° and 3.4 ± 2.0°, respectively. Leg length errors were 1.41 ± 1.01 mm (synthetic) and 1.26 ± 0.94 mm (cadaveric). The cadaveric model demonstrated a small improvement in flexion/extension and the synthetic atlas performed slightly faster (6 min 24 s ± 50 s versus 8 min 42 s ± 2 min 25 s).</p><p><strong>Conclusions: </strong>This atlas-based algorithm quantified malalignment in complex femoral shaft fractures within clinical tolerances from a single CBCT image of the fractured limb.</p>\",\"PeriodicalId\":50644,\"journal\":{\"name\":\"Computer Aided Surgery\",\"volume\":\"19 1-3\",\"pages\":\"48-56\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2014-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.3109/10929088.2014.894126\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Computer Aided Surgery\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3109/10929088.2014.894126\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2014/4/10 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q\",\"JCRName\":\"Medicine\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Aided Surgery","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3109/10929088.2014.894126","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2014/4/10 0:00:00","PubModel":"Epub","JCR":"Q","JCRName":"Medicine","Score":null,"Total":0}
3D atlas-based registration can calculate malalignment of femoral shaft fractures in six degrees of freedom.
Objective: This study presents and evaluates a semi-automated algorithm for quantifying malalignment in complex femoral shaft fractures from a single intraoperative cone-beam CT (CBCT) image of the fractured limb.
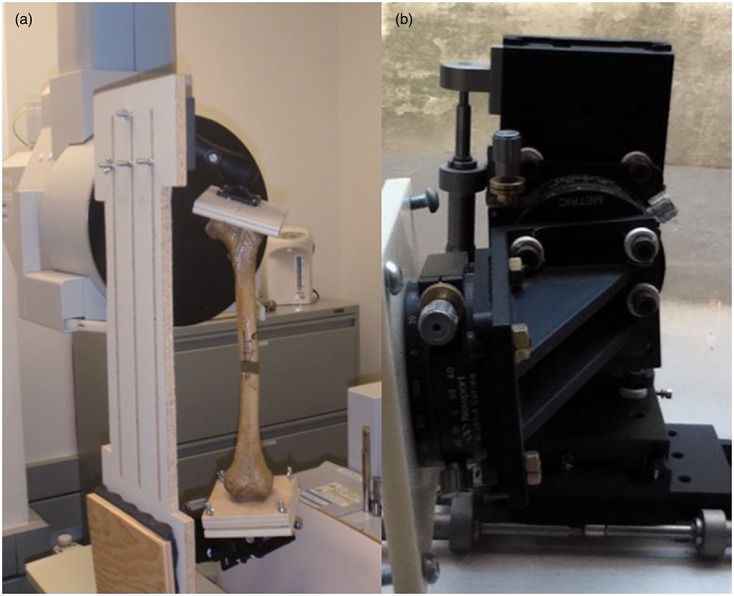
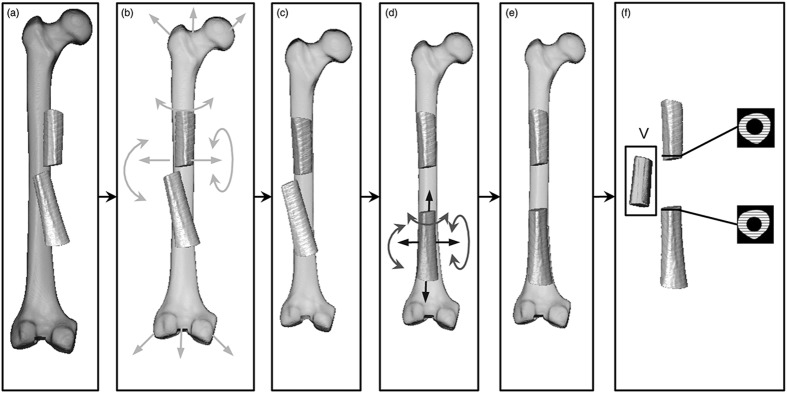
Methods: CBCT images were acquired of complex comminuted diaphyseal fractures created in 9 cadaveric femora (27 cases). Scans were segmented using intensity-based thresholding, yielding image stacks of the proximal, distal and comminuted bone. Semi-deformable and rigid affine registrations to an intact femur atlas (synthetic or cadaveric-based) were performed to transform the distal fragment to its neutral alignment. Leg length was calculated from the volume of bone within the comminution fragment. The transformations were compared to the physical input malalignments.
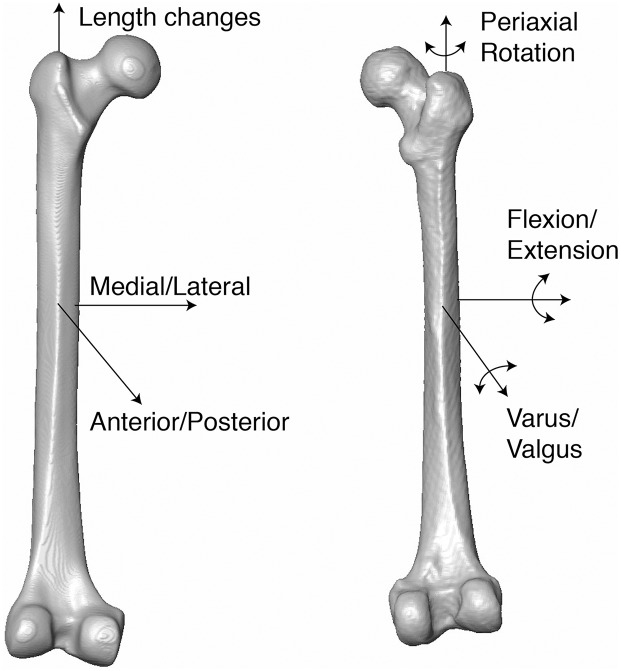
Results: Using the synthetic atlas, translations were within 1.71 ± 1.08 mm (medial/lateral) and 2.24 ± 2.11 mm (anterior/posterior). The varus/valgus, flexion/extension and periaxial rotation errors were 3.45 ± 2.6°, 1.86 ± 1.5° and 3.4 ± 2.0°, respectively. The cadaveric-based atlas yielded similar results in medial/lateral and anterior/posterior translation (1.73 ± 1.28 mm and 2.15 ± 2.13 mm, respectively). Varus/valgus, flexion/extension and periaxial rotation errors were 2.3 ± 1.3°, 2.0 ± 1.6° and 3.4 ± 2.0°, respectively. Leg length errors were 1.41 ± 1.01 mm (synthetic) and 1.26 ± 0.94 mm (cadaveric). The cadaveric model demonstrated a small improvement in flexion/extension and the synthetic atlas performed slightly faster (6 min 24 s ± 50 s versus 8 min 42 s ± 2 min 25 s).
Conclusions: This atlas-based algorithm quantified malalignment in complex femoral shaft fractures within clinical tolerances from a single CBCT image of the fractured limb.
期刊介绍:
The scope of Computer Aided Surgery encompasses all fields within surgery, as well as biomedical imaging and instrumentation, and digital technology employed as an adjunct to imaging in diagnosis, therapeutics, and surgery. Topics featured include frameless as well as conventional stereotaxic procedures, surgery guided by ultrasound, image guided focal irradiation, robotic surgery, and other therapeutic interventions that are performed with the use of digital imaging technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


