{"title":"结合先验信息的基于点高斯近似滤波器的基因调控网络推断。","authors":"Bin Jia, Xiaodong Wang","doi":"10.1186/1687-4153-2013-16","DOIUrl":null,"url":null,"abstract":"<p><p>: The extended Kalman filter (EKF) has been applied to inferring gene regulatory networks. However, it is well known that the EKF becomes less accurate when the system exhibits high nonlinearity. In addition, certain prior information about the gene regulatory network exists in practice, and no systematic approach has been developed to incorporate such prior information into the Kalman-type filter for inferring the structure of the gene regulatory network. In this paper, an inference framework based on point-based Gaussian approximation filters that can exploit the prior information is developed to solve the gene regulatory network inference problem. Different point-based Gaussian approximation filters, including the unscented Kalman filter (UKF), the third-degree cubature Kalman filter (CKF3), and the fifth-degree cubature Kalman filter (CKF5) are employed. Several types of network prior information, including the existing network structure information, sparsity assumption, and the range constraint of parameters, are considered, and the corresponding filters incorporating the prior information are developed. Experiments on a synthetic network of eight genes and the yeast protein synthesis network of five genes are carried out to demonstrate the performance of the proposed framework. The results show that the proposed methods provide more accurate inference results than existing methods, such as the EKF and the traditional UKF. </p>","PeriodicalId":72957,"journal":{"name":"EURASIP journal on bioinformatics & systems biology","volume":"2013 1","pages":"16"},"PeriodicalIF":0.0000,"publicationDate":"2013-12-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/1687-4153-2013-16","citationCount":"4","resultStr":"{\"title\":\"Gene regulatory network inference by point-based Gaussian approximation filters incorporating the prior information.\",\"authors\":\"Bin Jia, Xiaodong Wang\",\"doi\":\"10.1186/1687-4153-2013-16\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>: The extended Kalman filter (EKF) has been applied to inferring gene regulatory networks. However, it is well known that the EKF becomes less accurate when the system exhibits high nonlinearity. In addition, certain prior information about the gene regulatory network exists in practice, and no systematic approach has been developed to incorporate such prior information into the Kalman-type filter for inferring the structure of the gene regulatory network. In this paper, an inference framework based on point-based Gaussian approximation filters that can exploit the prior information is developed to solve the gene regulatory network inference problem. Different point-based Gaussian approximation filters, including the unscented Kalman filter (UKF), the third-degree cubature Kalman filter (CKF3), and the fifth-degree cubature Kalman filter (CKF5) are employed. Several types of network prior information, including the existing network structure information, sparsity assumption, and the range constraint of parameters, are considered, and the corresponding filters incorporating the prior information are developed. Experiments on a synthetic network of eight genes and the yeast protein synthesis network of five genes are carried out to demonstrate the performance of the proposed framework. The results show that the proposed methods provide more accurate inference results than existing methods, such as the EKF and the traditional UKF. </p>\",\"PeriodicalId\":72957,\"journal\":{\"name\":\"EURASIP journal on bioinformatics & systems biology\",\"volume\":\"2013 1\",\"pages\":\"16\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2013-12-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1186/1687-4153-2013-16\",\"citationCount\":\"4\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"EURASIP journal on bioinformatics & systems biology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/1687-4153-2013-16\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"EURASIP journal on bioinformatics & systems biology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/1687-4153-2013-16","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Gene regulatory network inference by point-based Gaussian approximation filters incorporating the prior information.
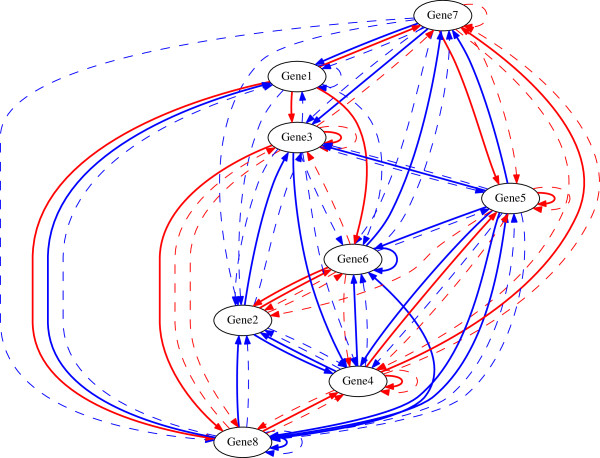
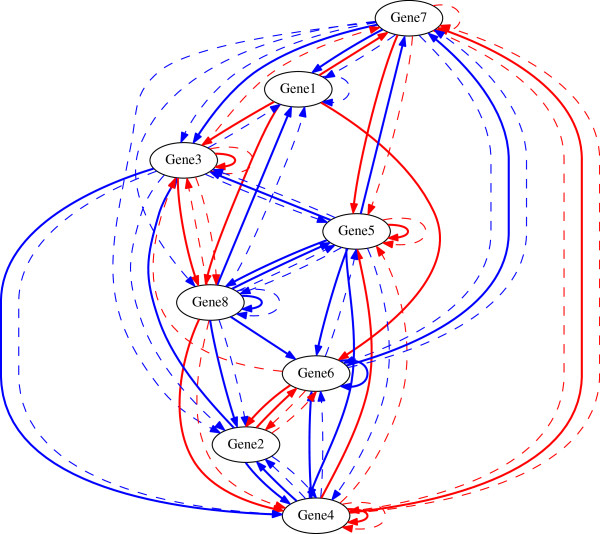
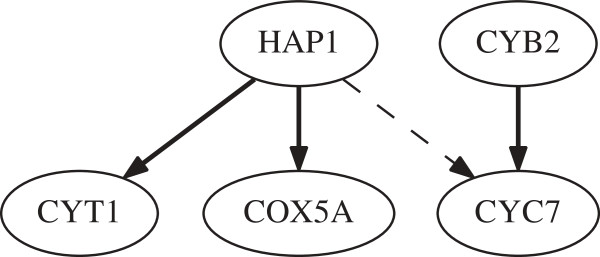
: The extended Kalman filter (EKF) has been applied to inferring gene regulatory networks. However, it is well known that the EKF becomes less accurate when the system exhibits high nonlinearity. In addition, certain prior information about the gene regulatory network exists in practice, and no systematic approach has been developed to incorporate such prior information into the Kalman-type filter for inferring the structure of the gene regulatory network. In this paper, an inference framework based on point-based Gaussian approximation filters that can exploit the prior information is developed to solve the gene regulatory network inference problem. Different point-based Gaussian approximation filters, including the unscented Kalman filter (UKF), the third-degree cubature Kalman filter (CKF3), and the fifth-degree cubature Kalman filter (CKF5) are employed. Several types of network prior information, including the existing network structure information, sparsity assumption, and the range constraint of parameters, are considered, and the corresponding filters incorporating the prior information are developed. Experiments on a synthetic network of eight genes and the yeast protein synthesis network of five genes are carried out to demonstrate the performance of the proposed framework. The results show that the proposed methods provide more accurate inference results than existing methods, such as the EKF and the traditional UKF.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


