{"title":"血管介入机器人机构远程转向应用研究。","authors":"Zengmin Tian, Bo Jia, Wangsheng Lu, Rui Hui","doi":"10.2174/1874431101105010046","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Recently, robotic systems have been introduced as a useful method for surgical procedures. But in the field of vascular interventional therapy, the development of robotic system is slower.</p><p><strong>Objective: </strong>The purpose of the study is to verify the reliability and safety of vascular interventional robotic system used in angiography, by the way of in vitro preliminary experiments and animal experiments.</p><p><strong>Method: </strong>The approach is to employ a proprietary vascular interventional robot system to complete glass vessel models and animal angiogram experiments. This robot system consists of a console port (remote steering system), an assistant port (propelled and rotation system) and a hydraulic fixing device, upon which surgeons control remotely to make go forward and rotate in the glass vessel models and animal vessels, on the 3D operation interface. Consequently, the operation time and success rate are counted and evaluated.</p><p><strong>Result: </strong>In the glass vessel model experiments, the Catheter can enter various kinds of vessel models with inside diameter length greater than 3mm and angle less than 90(o). In the animal (adult dogs) experiments, surgeons can accomplish smoothly the angiogram of the renal artery, the vertebral renal and the arteria carotis communis, without any complications of surgery.</p><p><strong>Conclusion: </strong>The angiogram by using vascular interventional robot system is safe and reliable. Surgeons can finish the angiogram in part by remote operation, and the result of angiogram can meet a number of simple expectations. However without wire control and force feedback systems, the applicability of this kind of robot system is not flexible enough and need to be improved in the future.</p>","PeriodicalId":88331,"journal":{"name":"The open medical informatics journal","volume":"5 Suppl 1","pages":"46-9"},"PeriodicalIF":0.0000,"publicationDate":"2011-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/c7/ef/TOMINFOJ-5-46.PMC3149832.pdf","citationCount":"2","resultStr":"{\"title\":\"Application study of vascular interventional robotic mechanism for remote steering.\",\"authors\":\"Zengmin Tian, Bo Jia, Wangsheng Lu, Rui Hui\",\"doi\":\"10.2174/1874431101105010046\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Recently, robotic systems have been introduced as a useful method for surgical procedures. But in the field of vascular interventional therapy, the development of robotic system is slower.</p><p><strong>Objective: </strong>The purpose of the study is to verify the reliability and safety of vascular interventional robotic system used in angiography, by the way of in vitro preliminary experiments and animal experiments.</p><p><strong>Method: </strong>The approach is to employ a proprietary vascular interventional robot system to complete glass vessel models and animal angiogram experiments. This robot system consists of a console port (remote steering system), an assistant port (propelled and rotation system) and a hydraulic fixing device, upon which surgeons control remotely to make go forward and rotate in the glass vessel models and animal vessels, on the 3D operation interface. Consequently, the operation time and success rate are counted and evaluated.</p><p><strong>Result: </strong>In the glass vessel model experiments, the Catheter can enter various kinds of vessel models with inside diameter length greater than 3mm and angle less than 90(o). In the animal (adult dogs) experiments, surgeons can accomplish smoothly the angiogram of the renal artery, the vertebral renal and the arteria carotis communis, without any complications of surgery.</p><p><strong>Conclusion: </strong>The angiogram by using vascular interventional robot system is safe and reliable. Surgeons can finish the angiogram in part by remote operation, and the result of angiogram can meet a number of simple expectations. However without wire control and force feedback systems, the applicability of this kind of robot system is not flexible enough and need to be improved in the future.</p>\",\"PeriodicalId\":88331,\"journal\":{\"name\":\"The open medical informatics journal\",\"volume\":\"5 Suppl 1\",\"pages\":\"46-9\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2011-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/c7/ef/TOMINFOJ-5-46.PMC3149832.pdf\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The open medical informatics journal\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.2174/1874431101105010046\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2011/7/27 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The open medical informatics journal","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.2174/1874431101105010046","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2011/7/27 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Application study of vascular interventional robotic mechanism for remote steering.
Background: Recently, robotic systems have been introduced as a useful method for surgical procedures. But in the field of vascular interventional therapy, the development of robotic system is slower.
Objective: The purpose of the study is to verify the reliability and safety of vascular interventional robotic system used in angiography, by the way of in vitro preliminary experiments and animal experiments.
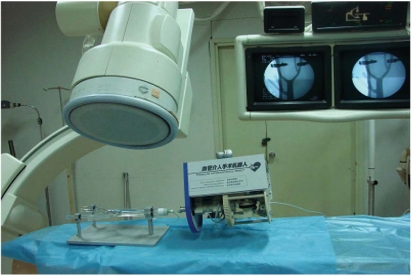
Method: The approach is to employ a proprietary vascular interventional robot system to complete glass vessel models and animal angiogram experiments. This robot system consists of a console port (remote steering system), an assistant port (propelled and rotation system) and a hydraulic fixing device, upon which surgeons control remotely to make go forward and rotate in the glass vessel models and animal vessels, on the 3D operation interface. Consequently, the operation time and success rate are counted and evaluated.
Result: In the glass vessel model experiments, the Catheter can enter various kinds of vessel models with inside diameter length greater than 3mm and angle less than 90(o). In the animal (adult dogs) experiments, surgeons can accomplish smoothly the angiogram of the renal artery, the vertebral renal and the arteria carotis communis, without any complications of surgery.
Conclusion: The angiogram by using vascular interventional robot system is safe and reliable. Surgeons can finish the angiogram in part by remote operation, and the result of angiogram can meet a number of simple expectations. However without wire control and force feedback systems, the applicability of this kind of robot system is not flexible enough and need to be improved in the future.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


