不完全通信条件下优化协同感知的自动驾驶车辆可见度扩展
IF 7.6
1区 工程技术
Q1 TRANSPORTATION SCIENCE & TECHNOLOGY
Transportation Research Part C-Emerging Technologies
Pub Date : 2025-10-07
DOI:10.1016/j.trc.2025.105350
引用次数: 0
摘要
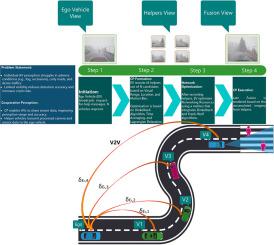
自动驾驶汽车(AVs)依靠个人感知系统来安全导航。然而,这些系统在恶劣的天气条件、复杂的道路几何形状和密集的交通场景下面临着重大挑战。合作感知(CP)是一种很有前途的方法,通过联合处理多辆车共享的摄像头馈送和传感器读数,来提高自动驾驶汽车的感知质量。这项工作提出了一个新的CP框架,旨在优化不完全通信下的车辆选择和网络资源利用,其中自我和辅助车辆之间的消息交换受到噪声,干扰和衰落的影响,由非零丢包率表示。我们优化的CP编队考虑了诸如辅助车辆的空间位置、视觉范围、运动模糊和可用通信预算等关键因素。此外,我们的资源优化模块在分配通信通道的同时调整功率水平,以最大限度地提高自我和辅助车辆之间的数据流效率,同时考虑到现代车辆通信系统的现实模型,如LTE和5G NR-V2X。我们使用CARLA模拟器生成的合成数据,通过在具有挑战性的场景中进行行人检测的大量实验来验证我们的方法。结果表明,我们的方法显著提高了单个自动驾驶汽车的感知质量,检测精度提高了约10%。这一重大进展揭示了CP在复杂情况下提高自动驾驶安全性和性能的潜力。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Extended visibility of autonomous vehicles via optimized cooperative perception under imperfect communication
Autonomous Vehicles (AVs) rely on individual perception systems to navigate safely. However, these systems face significant challenges in adverse weather conditions, complex road geometries, and dense traffic scenarios. Cooperative Perception (CP) has emerged as a promising approach to extending the perception quality of AVs by jointly processing shared camera feeds and sensor readings across multiple vehicles. This work presents a novel CP framework designed to optimize vehicle selection and networking resource utilization under imperfect communications, where message exchange between the ego and helper vehicles is subject to noise, interference, and fading, represented by nonzero packet drop rates. Our optimized CP formation considers critical factors such as the helper vehicles’ spatial position, visual range, motion blur, and available communication budgets. Furthermore, our resource optimization module allocates communication channels while adjusting power levels to maximize data flow efficiency between the ego and helper vehicles, considering realistic models of modern vehicular communication systems, such as LTE and 5G NR-V2X. We validate our approach through extensive experiments on pedestrian detection in challenging scenarios, using synthetic data generated by the CARLA simulator. The results demonstrate that our method significantly improves upon the perception quality of individual AVs with about 10 % gain in detection accuracy. This substantial gain uncovers the unleashed potential of CP to enhance AV safety and performance in complex situations.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
15.80
自引率
12.00%
发文量
332
审稿时长
64 days
期刊介绍:
Transportation Research: Part C (TR_C) is dedicated to showcasing high-quality, scholarly research that delves into the development, applications, and implications of transportation systems and emerging technologies. Our focus lies not solely on individual technologies, but rather on their broader implications for the planning, design, operation, control, maintenance, and rehabilitation of transportation systems, services, and components. In essence, the intellectual core of the journal revolves around the transportation aspect rather than the technology itself. We actively encourage the integration of quantitative methods from diverse fields such as operations research, control systems, complex networks, computer science, and artificial intelligence. Join us in exploring the intersection of transportation systems and emerging technologies to drive innovation and progress in the field.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


