Zhao Han, Daniel Hammer, Kevin Spevak, Mark Higger, Aaron Fanganello, Neil T Dantam, Tom Williams
{"title":"机器人任务指令的给定层次理论排序。","authors":"Zhao Han, Daniel Hammer, Kevin Spevak, Mark Higger, Aaron Fanganello, Neil T Dantam, Tom Williams","doi":"10.3389/frobt.2025.1640535","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>When collaborative robots teach human teammates new tasks, they must carefully determine the order to explain different parts of the task. In robotics, this problem is especially challenging, due to the situated and dynamic nature of robot task instruction.</p><p><strong>Method: </strong>In this work, we consider how robots can leverage the Givenness Hierarchy to \"think ahead\" about the objects they must refer to so that they can sequence object references to form a coherent, easy-to-follow series of instructions.</p><p><strong>Results and discussion: </strong>Our experimental results (n = 82) show that robots using this GH-informed planner generate instructions that are more natural, fluent, understandable, and intelligent, less workload demanding, and that can be more efficiently completed.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1640535"},"PeriodicalIF":3.0000,"publicationDate":"2025-09-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12504070/pdf/","citationCount":"0","resultStr":"{\"title\":\"Givenness hierarchy theoretic sequencing of robot task instructions.\",\"authors\":\"Zhao Han, Daniel Hammer, Kevin Spevak, Mark Higger, Aaron Fanganello, Neil T Dantam, Tom Williams\",\"doi\":\"10.3389/frobt.2025.1640535\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>When collaborative robots teach human teammates new tasks, they must carefully determine the order to explain different parts of the task. In robotics, this problem is especially challenging, due to the situated and dynamic nature of robot task instruction.</p><p><strong>Method: </strong>In this work, we consider how robots can leverage the Givenness Hierarchy to \\\"think ahead\\\" about the objects they must refer to so that they can sequence object references to form a coherent, easy-to-follow series of instructions.</p><p><strong>Results and discussion: </strong>Our experimental results (n = 82) show that robots using this GH-informed planner generate instructions that are more natural, fluent, understandable, and intelligent, less workload demanding, and that can be more efficiently completed.</p>\",\"PeriodicalId\":47597,\"journal\":{\"name\":\"Frontiers in Robotics and AI\",\"volume\":\"12 \",\"pages\":\"1640535\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-09-24\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12504070/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Robotics and AI\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/frobt.2025.1640535\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1640535","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Givenness hierarchy theoretic sequencing of robot task instructions.
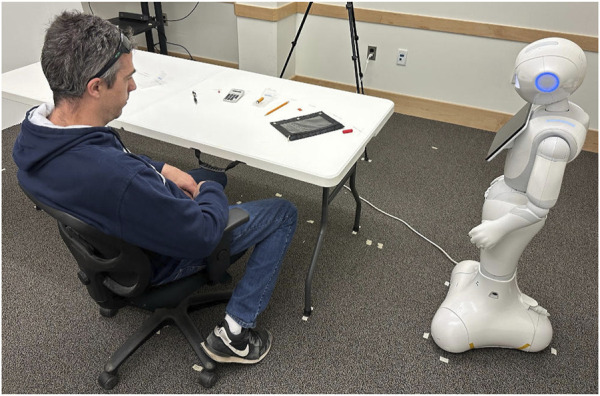
Introduction: When collaborative robots teach human teammates new tasks, they must carefully determine the order to explain different parts of the task. In robotics, this problem is especially challenging, due to the situated and dynamic nature of robot task instruction.
Method: In this work, we consider how robots can leverage the Givenness Hierarchy to "think ahead" about the objects they must refer to so that they can sequence object references to form a coherent, easy-to-follow series of instructions.
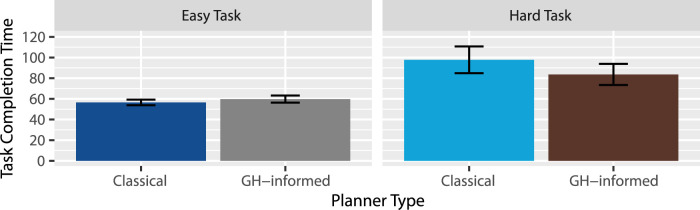
Results and discussion: Our experimental results (n = 82) show that robots using this GH-informed planner generate instructions that are more natural, fluent, understandable, and intelligent, less workload demanding, and that can be more efficiently completed.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


