Takao Hiraki, Yusuke Matsui, Jun Sakurai, Koji Tomita, Mayu Uka, Soichiro Kajita, Noriyuki Umakoshi, Toshihiro Iguchi, Michihiro Yoshida, Kota Sakamoto, Takayuki Matsuno, Tetsushi Kamegawa
{"title":"ct引导干预中机器人与人工插针的比较:前瞻性随机试验。","authors":"Takao Hiraki, Yusuke Matsui, Jun Sakurai, Koji Tomita, Mayu Uka, Soichiro Kajita, Noriyuki Umakoshi, Toshihiro Iguchi, Michihiro Yoshida, Kota Sakamoto, Takayuki Matsuno, Tetsushi Kamegawa","doi":"10.1093/radadv/umaf010","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Robotic needle insertion under CT guidance has been developed, but data on comparison with manual insertion are still lacking.</p><p><strong>Purpose: </strong>To compare robotic versus manual needle insertion for CT fluoroscopy-guided intervention, primarily in terms of insertion accuracy.</p><p><strong>Materials and methods: </strong>This was a prospective study between May 2020 and March 2023 at a single site. The cohort comprised 22 patients undergoing CT (Aquilion One or Aquilion CX; Canon Medical Systems) fluoroscopy-guided biopsy, who were randomly allocated to either the robotic or manual group. The robot used (Zerobot; Medicalnet Okayama) is not yet commercially available. A biopsy introducer needle was inserted by 1 of 3 physicians using a remote-control robot in the robotic group, versus by 1 of 3 different physicians by hand in the manual group. The primary endpoint was needle insertion accuracy, which was defined as the 3-dimensional Euclidean distance between a predetermined target point and the needle tip after insertion. The non-inferiority of robotic insertion to manual one was then tested. Adverse events were evaluated. Statistical comparisons were made between the 2 groups.</p><p><strong>Results: </strong>Technical success and pathological findings were confirmed in all patients of the 2 groups. The mean and SD of needle insertion were 4.8 mm ± 2.6 in the robotic group and 7.0 mm ± 3.1 in the manual group (<i>P</i> < .001). The mean difference in accuracy between the 2 groups (robotic minus manual group) was -2.1 mm (95% CI, -4.7 to 0.4). Effective dose to physicians was zero in all cases in the robotic group, while median dose was 1.0 µSv in the manual group (<i>P</i> < .001). Dose length product to patients was not significantly different between the 2 groups (<i>P</i> = .100). No major adverse events were observed.</p><p><strong>Conclusion: </strong>Robotic needle insertion was non-inferior to manual insertion in terms of accuracy, while it effectively eliminated radiation exposure to physicians.</p><p><strong>Trial registration number: </strong>jRCT2062200013.</p>","PeriodicalId":519940,"journal":{"name":"Radiology advances","volume":"2 2","pages":"umaf010"},"PeriodicalIF":0.0000,"publicationDate":"2025-04-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12429234/pdf/","citationCount":"0","resultStr":"{\"title\":\"Comparison of robotic versus manual needle insertion for CT-guided intervention: prospective randomized trial.\",\"authors\":\"Takao Hiraki, Yusuke Matsui, Jun Sakurai, Koji Tomita, Mayu Uka, Soichiro Kajita, Noriyuki Umakoshi, Toshihiro Iguchi, Michihiro Yoshida, Kota Sakamoto, Takayuki Matsuno, Tetsushi Kamegawa\",\"doi\":\"10.1093/radadv/umaf010\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Robotic needle insertion under CT guidance has been developed, but data on comparison with manual insertion are still lacking.</p><p><strong>Purpose: </strong>To compare robotic versus manual needle insertion for CT fluoroscopy-guided intervention, primarily in terms of insertion accuracy.</p><p><strong>Materials and methods: </strong>This was a prospective study between May 2020 and March 2023 at a single site. The cohort comprised 22 patients undergoing CT (Aquilion One or Aquilion CX; Canon Medical Systems) fluoroscopy-guided biopsy, who were randomly allocated to either the robotic or manual group. The robot used (Zerobot; Medicalnet Okayama) is not yet commercially available. A biopsy introducer needle was inserted by 1 of 3 physicians using a remote-control robot in the robotic group, versus by 1 of 3 different physicians by hand in the manual group. The primary endpoint was needle insertion accuracy, which was defined as the 3-dimensional Euclidean distance between a predetermined target point and the needle tip after insertion. The non-inferiority of robotic insertion to manual one was then tested. Adverse events were evaluated. Statistical comparisons were made between the 2 groups.</p><p><strong>Results: </strong>Technical success and pathological findings were confirmed in all patients of the 2 groups. The mean and SD of needle insertion were 4.8 mm ± 2.6 in the robotic group and 7.0 mm ± 3.1 in the manual group (<i>P</i> < .001). The mean difference in accuracy between the 2 groups (robotic minus manual group) was -2.1 mm (95% CI, -4.7 to 0.4). Effective dose to physicians was zero in all cases in the robotic group, while median dose was 1.0 µSv in the manual group (<i>P</i> < .001). Dose length product to patients was not significantly different between the 2 groups (<i>P</i> = .100). No major adverse events were observed.</p><p><strong>Conclusion: </strong>Robotic needle insertion was non-inferior to manual insertion in terms of accuracy, while it effectively eliminated radiation exposure to physicians.</p><p><strong>Trial registration number: </strong>jRCT2062200013.</p>\",\"PeriodicalId\":519940,\"journal\":{\"name\":\"Radiology advances\",\"volume\":\"2 2\",\"pages\":\"umaf010\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-04-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12429234/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Radiology advances\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1093/radadv/umaf010\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/3/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Radiology advances","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1093/radadv/umaf010","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/3/1 0:00:00","PubModel":"eCollection","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
摘要
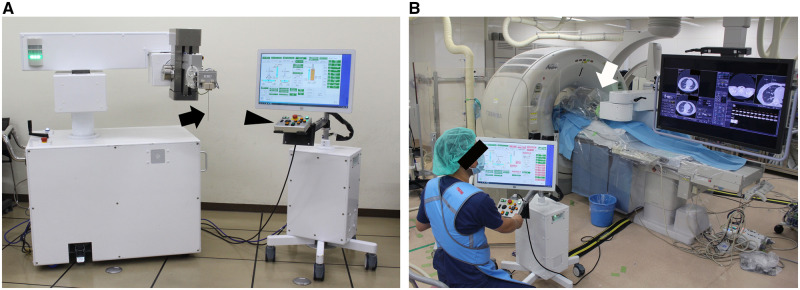
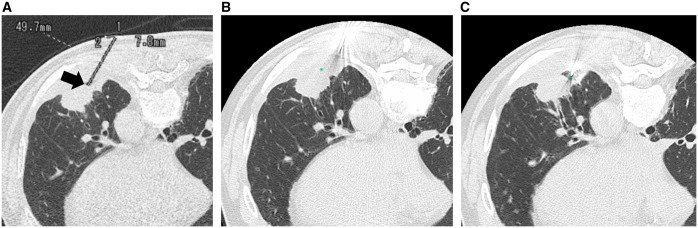
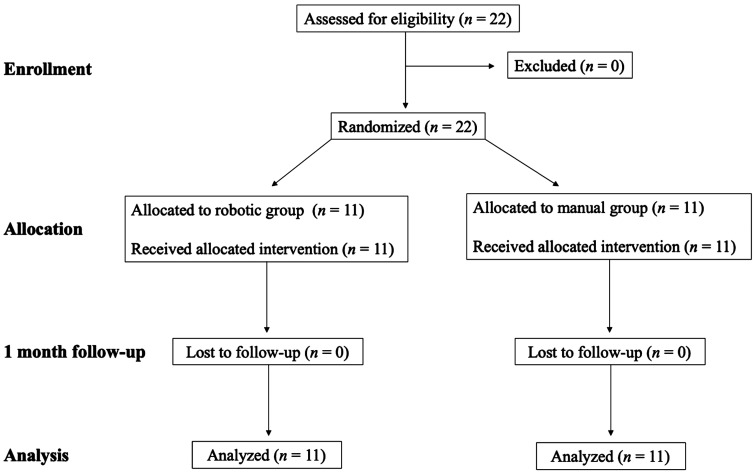
背景:CT引导下的机器人插针已经发展起来,但与人工插针比较的数据仍然缺乏。目的:比较CT透视引导下的介入手术中机器人与人工插针的精确性。材料和方法:这是一项于2020年5月至2023年3月在单个地点进行的前瞻性研究。该队列包括22名接受CT (Aquilion One或Aquilion CX; Canon Medical Systems)透视引导活检的患者,他们被随机分配到机器人组或手动组。所使用的机器人(Zerobot; Medicalnet Okayama)尚未商业化。在机器人组中,三名医生中有一名使用遥控机器人插入活检针,而在人工组中,三名不同的医生中有一名用手插入活检针。主要终点是针头插入精度,其定义为针头插入后预定目标点与针尖之间的三维欧氏距离。然后测试了机器人插入与人工插入的非劣性。评估不良事件。两组间进行统计学比较。结果:两组患者均获得技术成功,病理检查结果均得到证实。机器人组插针的平均值为4.8 mm±2.6,手动组为7.0 mm±3.1 (P P P = 0.100)。未观察到重大不良事件。结论:机器人插针的准确性不低于人工插针,同时有效地消除了对医生的辐射暴露。试验注册号:jRCT2062200013。
Comparison of robotic versus manual needle insertion for CT-guided intervention: prospective randomized trial.
Background: Robotic needle insertion under CT guidance has been developed, but data on comparison with manual insertion are still lacking.
Purpose: To compare robotic versus manual needle insertion for CT fluoroscopy-guided intervention, primarily in terms of insertion accuracy.
Materials and methods: This was a prospective study between May 2020 and March 2023 at a single site. The cohort comprised 22 patients undergoing CT (Aquilion One or Aquilion CX; Canon Medical Systems) fluoroscopy-guided biopsy, who were randomly allocated to either the robotic or manual group. The robot used (Zerobot; Medicalnet Okayama) is not yet commercially available. A biopsy introducer needle was inserted by 1 of 3 physicians using a remote-control robot in the robotic group, versus by 1 of 3 different physicians by hand in the manual group. The primary endpoint was needle insertion accuracy, which was defined as the 3-dimensional Euclidean distance between a predetermined target point and the needle tip after insertion. The non-inferiority of robotic insertion to manual one was then tested. Adverse events were evaluated. Statistical comparisons were made between the 2 groups.
Results: Technical success and pathological findings were confirmed in all patients of the 2 groups. The mean and SD of needle insertion were 4.8 mm ± 2.6 in the robotic group and 7.0 mm ± 3.1 in the manual group (P < .001). The mean difference in accuracy between the 2 groups (robotic minus manual group) was -2.1 mm (95% CI, -4.7 to 0.4). Effective dose to physicians was zero in all cases in the robotic group, while median dose was 1.0 µSv in the manual group (P < .001). Dose length product to patients was not significantly different between the 2 groups (P = .100). No major adverse events were observed.
Conclusion: Robotic needle insertion was non-inferior to manual insertion in terms of accuracy, while it effectively eliminated radiation exposure to physicians.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


