{"title":"信息vs情境:可信赖自动驾驶汽车的透明度和自主性的平衡。","authors":"Ana Tanevska, Katie Winkle, Ginevra Castellano","doi":"10.3389/frobt.2025.1657857","DOIUrl":null,"url":null,"abstract":"<p><p>With the rapid advancement of autonomous vehicle (AV) technology, AVs move beyond their initial purpose of only providing a self-driving and/or assistive driving experience, and progressively transform into interactive agents with some level of autonomy, as well as some context-dependent social features. This introduces new challenges and questions, already relevant in other areas of human-robot interaction (HRI), such as: if an AV is perceived as a social agent by the human with whom it is interacting or collaborating, how are the various facets of its interface and behaviour impacting its human partner? And how do we foster a successful collaboration between the human driver and the AV, maximizing the driver's comfort, agency, and trust in the AV? Our specific research goal in this area is to explore how the human's perception of the AV can vary across different levels of information sharing and autonomy of the AV. More precisely, in this work we sought to understand the various factors that could influence naïve participants' acceptance and trustworthiness of AV. In a between-subjects online study, informed by participatory design, we investigated the effects of different AV interfaces with different information levels on participants' perceptions of the AV, specifically their trust and comfort ratings. We also sought to understand how much the environment and the AV's behaviour play a role in determining the level of autonomy users will grant to the AV. We found that the transparency of the AV (described by the amount of information shared with the users) had a significant impact on people's trust and comfort in the car. Participants' relationship with the AV's autonomy however was more complex, and was influenced both by the AV's transparency, but also by the driving environment and the specific events happening in the scenes.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1657857"},"PeriodicalIF":3.0000,"publicationDate":"2025-09-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12497998/pdf/","citationCount":"0","resultStr":"{\"title\":\"Information vs situation: balancing transparency and autonomy for trustworthy autonomous vehicles.\",\"authors\":\"Ana Tanevska, Katie Winkle, Ginevra Castellano\",\"doi\":\"10.3389/frobt.2025.1657857\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>With the rapid advancement of autonomous vehicle (AV) technology, AVs move beyond their initial purpose of only providing a self-driving and/or assistive driving experience, and progressively transform into interactive agents with some level of autonomy, as well as some context-dependent social features. This introduces new challenges and questions, already relevant in other areas of human-robot interaction (HRI), such as: if an AV is perceived as a social agent by the human with whom it is interacting or collaborating, how are the various facets of its interface and behaviour impacting its human partner? And how do we foster a successful collaboration between the human driver and the AV, maximizing the driver's comfort, agency, and trust in the AV? Our specific research goal in this area is to explore how the human's perception of the AV can vary across different levels of information sharing and autonomy of the AV. More precisely, in this work we sought to understand the various factors that could influence naïve participants' acceptance and trustworthiness of AV. In a between-subjects online study, informed by participatory design, we investigated the effects of different AV interfaces with different information levels on participants' perceptions of the AV, specifically their trust and comfort ratings. We also sought to understand how much the environment and the AV's behaviour play a role in determining the level of autonomy users will grant to the AV. We found that the transparency of the AV (described by the amount of information shared with the users) had a significant impact on people's trust and comfort in the car. Participants' relationship with the AV's autonomy however was more complex, and was influenced both by the AV's transparency, but also by the driving environment and the specific events happening in the scenes.</p>\",\"PeriodicalId\":47597,\"journal\":{\"name\":\"Frontiers in Robotics and AI\",\"volume\":\"12 \",\"pages\":\"1657857\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-09-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12497998/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Robotics and AI\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/frobt.2025.1657857\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1657857","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
Information vs situation: balancing transparency and autonomy for trustworthy autonomous vehicles.
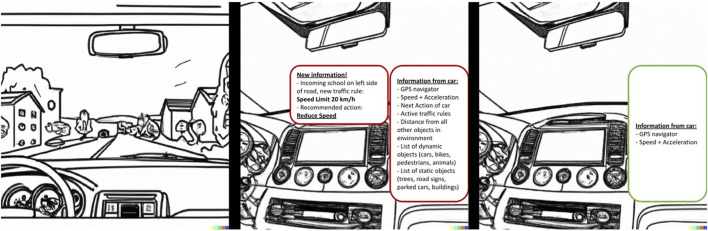
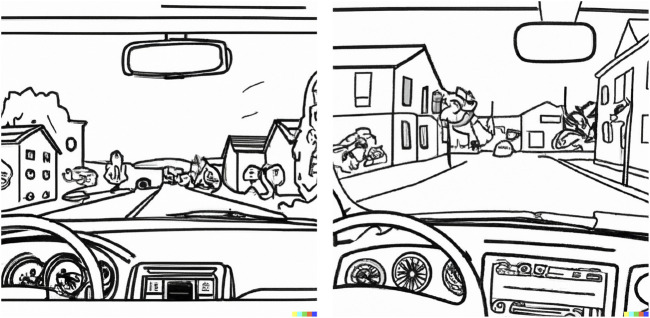
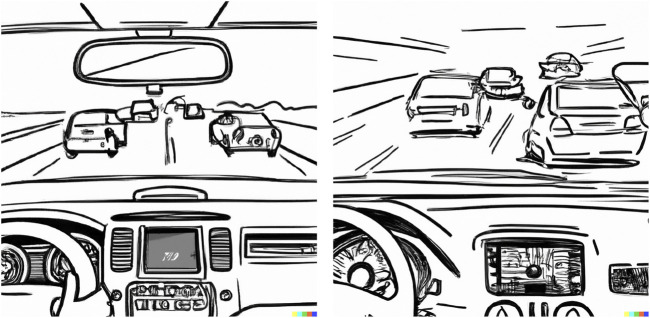
With the rapid advancement of autonomous vehicle (AV) technology, AVs move beyond their initial purpose of only providing a self-driving and/or assistive driving experience, and progressively transform into interactive agents with some level of autonomy, as well as some context-dependent social features. This introduces new challenges and questions, already relevant in other areas of human-robot interaction (HRI), such as: if an AV is perceived as a social agent by the human with whom it is interacting or collaborating, how are the various facets of its interface and behaviour impacting its human partner? And how do we foster a successful collaboration between the human driver and the AV, maximizing the driver's comfort, agency, and trust in the AV? Our specific research goal in this area is to explore how the human's perception of the AV can vary across different levels of information sharing and autonomy of the AV. More precisely, in this work we sought to understand the various factors that could influence naïve participants' acceptance and trustworthiness of AV. In a between-subjects online study, informed by participatory design, we investigated the effects of different AV interfaces with different information levels on participants' perceptions of the AV, specifically their trust and comfort ratings. We also sought to understand how much the environment and the AV's behaviour play a role in determining the level of autonomy users will grant to the AV. We found that the transparency of the AV (described by the amount of information shared with the users) had a significant impact on people's trust and comfort in the car. Participants' relationship with the AV's autonomy however was more complex, and was influenced both by the AV's transparency, but also by the driving environment and the specific events happening in the scenes.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


