从感知到精确:基于视觉的移动机器人操作装配螺丝
IF 11.4
1区 计算机科学
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
摘要
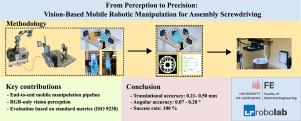
柔性制造要求自动化既精确又适应性强。然而,像螺丝刀这样的任务通常是自动化的,使用昂贵的、刚性的机器人单元,这使得这种方法不适合小批量、高混合的生产。作为一种可扩展的解决方案,移动机械手提供了一种灵活的选择,但由于定位的不确定性,实现所需的螺丝刀精度仍然具有挑战性。本文通过提出一种视觉引导的移动机器人操作系统来解决这些限制,该系统仅使用单目RGB图像执行高精度螺丝刀。该管道集成了固定式和机载摄像机,以及用于物体识别和分割、姿态估计和基于cad的螺钉孔定位的感知算法,补偿了基座错位和物体放置的可变性。使用ISO 9283标准度量的实验验证表明,在多个螺钉位置上的平移精度在0.21 mm至0.50 mm之间。此外,该系统的角度估计误差低至0.07°至0.20°,验证了其在定向估计中的亚度精度能力。在50次独立实验中,共进行了400次螺钉置入,成功率达到100%,证实了该系统在实际条件下的可靠性。这些结果证实了仅使用rgb视觉进行精密螺丝刀的可行性,并突出了移动操作系统在现实世界半结构化制造环境中的可扩展性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
From perception to precision: Vision-based mobile robotic manipulation for assembly screwdriving
Flexible manufacturing demands automation that is both precise and adaptable. However, tasks such as screwdriving are typically automated using costly, rigid robotic cells, making this approach impractical for low-volume, high-mix production. As a scalable solution, mobile manipulators offer a flexible alternative, but achieving the required precision for screwdriving remains challenging due to localization uncertainties. This paper addresses these limitations by presenting a vision-guided mobile robotic manipulation system that performs high-precision screwdriving using only monocular RGB imagery. The proposed pipeline integrates stationary and onboard cameras with perception algorithms for object identification and segmentation, pose estimation, and CAD-based screw hole localization, compensating for base misalignment and object placement variability. Experimental validation using ISO 9283 standard’s metrics demonstrates a translational accuracy between 0.21 mm and 0.50 mm across multiple screw positions. Additionally, the system achieves angular estimation errors as low as 0.07°to 0.20°, verifying its capability for sub-degree precision in orientation estimation. In 50 independent experiments involving a total of 400 screw insertions, the system achieved a 100 % success rate, confirming its reliability in practical conditions. These results confirm the feasibility of using RGB-only vision for precision screwdriving and highlight the mobile manipulation system’s scalability for real-world semi-structured manufacturing environments.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
24.10
自引率
13.50%
发文量
160
审稿时长
50 days
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


