Mauro L. Mugnai*, , , Yonathan Goldtzvik, , and , D. Thirumalai*,
{"title":"杠杆臂的灵活性控制肌球蛋白运动域的(非)耦合程度。","authors":"Mauro L. Mugnai*, , , Yonathan Goldtzvik, , and , D. Thirumalai*, ","doi":"10.1021/acs.jpcb.5c05554","DOIUrl":null,"url":null,"abstract":"<p >Dimeric myosin motors, with both heads simultaneously bound to filamentous actin, are in a frustrated conformation. The lever arm of each head would prefer to orient forward, but the interhead tension hinders the relaxation to the state favored by a myosin monomer. Here, we investigate theoretically the impact of lever arm stiffness and coupling to the head domain by using a polymer model. The theory for myosin V and myosin VI qualitatively reproduces the salient experimental observations. Furthermore, we construct chimeras in which the lever arm and head domains are swapped and predict that the fluctuations of the leading head lever arm of myosin VI are strongly impacted by the stiffness of the lever arm. Finally, by continuously and independently varying the lever arm persistence length and the strength of its coupling to the head domain, we predict their roles in altering the average geometry and conformational flexibility of the dimer. We explore conditions under which LH lever arm flexibility and coupling to the motor domain affect the angle it makes with respect to F-actin.</p>","PeriodicalId":60,"journal":{"name":"The Journal of Physical Chemistry B","volume":"129 41","pages":"10775–10785"},"PeriodicalIF":2.9000,"publicationDate":"2025-10-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Lever Arm Flexibility Controls the Extent of (Un)Coupling to the Motor Domain in Myosin Motors\",\"authors\":\"Mauro L. Mugnai*, , , Yonathan Goldtzvik, , and , D. Thirumalai*, \",\"doi\":\"10.1021/acs.jpcb.5c05554\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Dimeric myosin motors, with both heads simultaneously bound to filamentous actin, are in a frustrated conformation. The lever arm of each head would prefer to orient forward, but the interhead tension hinders the relaxation to the state favored by a myosin monomer. Here, we investigate theoretically the impact of lever arm stiffness and coupling to the head domain by using a polymer model. The theory for myosin V and myosin VI qualitatively reproduces the salient experimental observations. Furthermore, we construct chimeras in which the lever arm and head domains are swapped and predict that the fluctuations of the leading head lever arm of myosin VI are strongly impacted by the stiffness of the lever arm. Finally, by continuously and independently varying the lever arm persistence length and the strength of its coupling to the head domain, we predict their roles in altering the average geometry and conformational flexibility of the dimer. We explore conditions under which LH lever arm flexibility and coupling to the motor domain affect the angle it makes with respect to F-actin.</p>\",\"PeriodicalId\":60,\"journal\":{\"name\":\"The Journal of Physical Chemistry B\",\"volume\":\"129 41\",\"pages\":\"10775–10785\"},\"PeriodicalIF\":2.9000,\"publicationDate\":\"2025-10-02\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The Journal of Physical Chemistry B\",\"FirstCategoryId\":\"1\",\"ListUrlMain\":\"https://pubs.acs.org/doi/10.1021/acs.jpcb.5c05554\",\"RegionNum\":2,\"RegionCategory\":\"化学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"CHEMISTRY, PHYSICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The Journal of Physical Chemistry B","FirstCategoryId":"1","ListUrlMain":"https://pubs.acs.org/doi/10.1021/acs.jpcb.5c05554","RegionNum":2,"RegionCategory":"化学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"CHEMISTRY, PHYSICAL","Score":null,"Total":0}
Lever Arm Flexibility Controls the Extent of (Un)Coupling to the Motor Domain in Myosin Motors
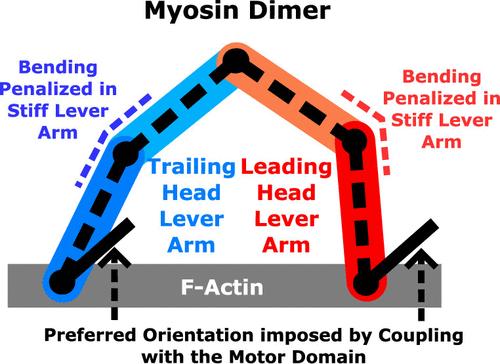
Dimeric myosin motors, with both heads simultaneously bound to filamentous actin, are in a frustrated conformation. The lever arm of each head would prefer to orient forward, but the interhead tension hinders the relaxation to the state favored by a myosin monomer. Here, we investigate theoretically the impact of lever arm stiffness and coupling to the head domain by using a polymer model. The theory for myosin V and myosin VI qualitatively reproduces the salient experimental observations. Furthermore, we construct chimeras in which the lever arm and head domains are swapped and predict that the fluctuations of the leading head lever arm of myosin VI are strongly impacted by the stiffness of the lever arm. Finally, by continuously and independently varying the lever arm persistence length and the strength of its coupling to the head domain, we predict their roles in altering the average geometry and conformational flexibility of the dimer. We explore conditions under which LH lever arm flexibility and coupling to the motor domain affect the angle it makes with respect to F-actin.
期刊介绍:
An essential criterion for acceptance of research articles in the journal is that they provide new physical insight. Please refer to the New Physical Insights virtual issue on what constitutes new physical insight. Manuscripts that are essentially reporting data or applications of data are, in general, not suitable for publication in JPC B.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


