改进蝙蝠算法优化的神经网络在旋转起重机控制中的应用研究
IF 0.8
Q4 ROBOTICS
引用次数: 0
摘要
本文提出了一种基于改进蝙蝠算法优化的三层神经网络控制器(NC)。在我们之前的研究中,仿真结果表明,使用原始BA优化的NC具有良好的控制和进化性能。但是,仿真执行时间较长。因此,为了解决这个问题,我们提出了一个改进的BA,它可以减少执行时间。结果表明,改进的BA优化后的数控系统与传统方法优化后的数控系统具有相同的控制性能。还表明,进化计算的时间可以减少。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Research on rotary crane control using a neural network optimized by an improved bat algorithm
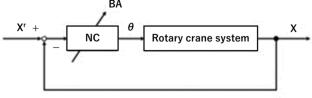
In this paper, we propose a three-layered neural network controller (NC) optimized using an improved bat algorithm (BA) for a rotary crane system. In our previous study, the simulation results showed that an NC optimized using the original BA exhibits good control and evolutionary performance. However, the simulation execution time was long. Therefore, to address this problem, we propose an improved BA that reduces the execution time. We show that the NC optimized by the improved BA exhibits the same control performance as that optimized via conventional methods. It is also shown that the time for evolutionary calculations can be reduced.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Artificial Life and Robotics
ROBOTICS-
CiteScore
2.00
自引率
22.20%
发文量
101
期刊介绍:
Artificial Life and Robotics is an international journal publishing original technical papers and authoritative state-of-the-art reviews on the development of new technologies concerning artificial life and robotics, especially computer-based simulation and hardware for the twenty-first century. This journal covers a broad multidisciplinary field, including areas such as artificial brain research, artificial intelligence, artificial life, artificial living, artificial mind research, brain science, chaos, cognitive science, complexity, computer graphics, evolutionary computations, fuzzy control, genetic algorithms, innovative computations, intelligent control and modelling, micromachines, micro-robot world cup soccer tournament, mobile vehicles, neural networks, neurocomputers, neurocomputing technologies and applications, robotics, robus virtual engineering, and virtual reality. Hardware-oriented submissions are particularly welcome.
Publishing body: International Symposium on Artificial Life and RoboticsEditor-in-Chiei: Hiroshi Tanaka Hatanaka R Apartment 101, Hatanaka 8-7A, Ooaza-Hatanaka, Oita city, Oita, Japan 870-0856 ©International Symposium on Artificial Life and Robotics
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


