{"title":"使用James-Stein估计量的黑盒变分推理的方差控制","authors":"Dominic B. Dayta, Takatomi Kubo, Kazushi Ikeda","doi":"10.1007/s10015-025-01030-4","DOIUrl":null,"url":null,"abstract":"<div><p>Black box variational inference is a promising framework in a succession of recent efforts to make Variational Inference more “black box”. However, in its basic version it either fails to converge due to instability or requires some fine-tuning of the update steps prior to execution that hinders it from being completely general purpose. We propose a method for regulating its parameter updates by re-framing stochastic optimization as a multivariate estimation problem. Borrowing from estimation theory, we examine the properties of the James–Stein estimator as a replacement for the arithmetic mean of Monte Carlo estimates of the gradient of the evidence lower bound. Theoretical guarantees for its variance reduction properties are also given. We show through simulations that the proposed method provides relatively weaker variance reduction than Rao-Blackwellization, but offers a tradeoff of being simpler and requiring no prior analysis on the part of the user. Comparisons on benchmark datasets also demonstrate a consistent performance at par or better than the Rao-Blackwellized approach in terms of resulting model fit.</p></div>","PeriodicalId":46050,"journal":{"name":"Artificial Life and Robotics","volume":"30 3","pages":"365 - 371"},"PeriodicalIF":0.8000,"publicationDate":"2025-05-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Variance control for black box variational inference using the James–Stein estimator\",\"authors\":\"Dominic B. Dayta, Takatomi Kubo, Kazushi Ikeda\",\"doi\":\"10.1007/s10015-025-01030-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Black box variational inference is a promising framework in a succession of recent efforts to make Variational Inference more “black box”. However, in its basic version it either fails to converge due to instability or requires some fine-tuning of the update steps prior to execution that hinders it from being completely general purpose. We propose a method for regulating its parameter updates by re-framing stochastic optimization as a multivariate estimation problem. Borrowing from estimation theory, we examine the properties of the James–Stein estimator as a replacement for the arithmetic mean of Monte Carlo estimates of the gradient of the evidence lower bound. Theoretical guarantees for its variance reduction properties are also given. We show through simulations that the proposed method provides relatively weaker variance reduction than Rao-Blackwellization, but offers a tradeoff of being simpler and requiring no prior analysis on the part of the user. Comparisons on benchmark datasets also demonstrate a consistent performance at par or better than the Rao-Blackwellized approach in terms of resulting model fit.</p></div>\",\"PeriodicalId\":46050,\"journal\":{\"name\":\"Artificial Life and Robotics\",\"volume\":\"30 3\",\"pages\":\"365 - 371\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2025-05-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Artificial Life and Robotics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10015-025-01030-4\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Artificial Life and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s10015-025-01030-4","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ROBOTICS","Score":null,"Total":0}
Variance control for black box variational inference using the James–Stein estimator
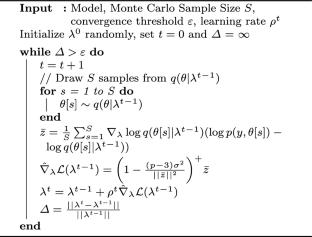
Black box variational inference is a promising framework in a succession of recent efforts to make Variational Inference more “black box”. However, in its basic version it either fails to converge due to instability or requires some fine-tuning of the update steps prior to execution that hinders it from being completely general purpose. We propose a method for regulating its parameter updates by re-framing stochastic optimization as a multivariate estimation problem. Borrowing from estimation theory, we examine the properties of the James–Stein estimator as a replacement for the arithmetic mean of Monte Carlo estimates of the gradient of the evidence lower bound. Theoretical guarantees for its variance reduction properties are also given. We show through simulations that the proposed method provides relatively weaker variance reduction than Rao-Blackwellization, but offers a tradeoff of being simpler and requiring no prior analysis on the part of the user. Comparisons on benchmark datasets also demonstrate a consistent performance at par or better than the Rao-Blackwellized approach in terms of resulting model fit.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


