{"title":"自主模块化公交对接系统中的LiDAR-IMU SLAM框架","authors":"Yixu He , Yushu Gao , Yang Liu , Xiaobo Qu","doi":"10.1016/j.geits.2025.100343","DOIUrl":null,"url":null,"abstract":"<div><div>The Autonomous Modular Bus (AMB) introduces an innovative approach to public transportation by allowing modular buses to dock and undock seamlessly while in motion. This capability effectively alleviates traffic congestion and decreases energy usage through smoother and more efficient vehicle operation. However, achieving autonomous docking for AMBs poses significant challenges, including the need for precise localization in both horizontal and vertical dimensions and the ability to manage dynamic persistent obstacles in close-range scenarios. Existing Light Detection and Ranging (LiDAR)-based Simultaneous Localization and Mapping (SLAM) algorithms, such as LIO-SAM, perform well in static environments but encounter limitations in dynamic scenarios, particularly with occlusions and vertical drift during AMB docking. In this paper, we propose an enhanced LiDAR-Inertial Measurement Unit (IMU) SLAM framework focused on improving localization accuracy and robustness during AMB docking. Key contributions include: (1) A two-stage scan-to-map matching method with ground constraints to reduce z-axis drift; (2) A factor graph optimization strategy integrating IMU roll and pitch constraints and periodic resetting to mitigate long-term drift; (3) A deep learning-based front vehicle detection and point cloud filtering mechanism to reduce occlusion effects. Experimental evaluations on single-vehicle and dual-vehicle datasets demonstrate that our method significantly reduces Absolute Pose Error (APE) and Relative Pose Error (RPE) compared to existing methods. These results highlight the framework's ability to address the unique challenges of AMB docking, therefore helping alleviate traffic congestion and reduce energy consumption.</div></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"4 6","pages":"Article 100343"},"PeriodicalIF":16.4000,"publicationDate":"2025-07-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"LiDAR-IMU SLAM framework in autonomous modular bus docking systems\",\"authors\":\"Yixu He , Yushu Gao , Yang Liu , Xiaobo Qu\",\"doi\":\"10.1016/j.geits.2025.100343\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>The Autonomous Modular Bus (AMB) introduces an innovative approach to public transportation by allowing modular buses to dock and undock seamlessly while in motion. This capability effectively alleviates traffic congestion and decreases energy usage through smoother and more efficient vehicle operation. However, achieving autonomous docking for AMBs poses significant challenges, including the need for precise localization in both horizontal and vertical dimensions and the ability to manage dynamic persistent obstacles in close-range scenarios. Existing Light Detection and Ranging (LiDAR)-based Simultaneous Localization and Mapping (SLAM) algorithms, such as LIO-SAM, perform well in static environments but encounter limitations in dynamic scenarios, particularly with occlusions and vertical drift during AMB docking. In this paper, we propose an enhanced LiDAR-Inertial Measurement Unit (IMU) SLAM framework focused on improving localization accuracy and robustness during AMB docking. Key contributions include: (1) A two-stage scan-to-map matching method with ground constraints to reduce z-axis drift; (2) A factor graph optimization strategy integrating IMU roll and pitch constraints and periodic resetting to mitigate long-term drift; (3) A deep learning-based front vehicle detection and point cloud filtering mechanism to reduce occlusion effects. Experimental evaluations on single-vehicle and dual-vehicle datasets demonstrate that our method significantly reduces Absolute Pose Error (APE) and Relative Pose Error (RPE) compared to existing methods. These results highlight the framework's ability to address the unique challenges of AMB docking, therefore helping alleviate traffic congestion and reduce energy consumption.</div></div>\",\"PeriodicalId\":100596,\"journal\":{\"name\":\"Green Energy and Intelligent Transportation\",\"volume\":\"4 6\",\"pages\":\"Article 100343\"},\"PeriodicalIF\":16.4000,\"publicationDate\":\"2025-07-25\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Green Energy and Intelligent Transportation\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2773153725000933\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153725000933","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
LiDAR-IMU SLAM framework in autonomous modular bus docking systems
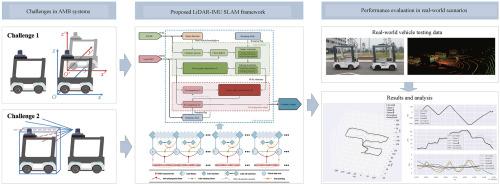
The Autonomous Modular Bus (AMB) introduces an innovative approach to public transportation by allowing modular buses to dock and undock seamlessly while in motion. This capability effectively alleviates traffic congestion and decreases energy usage through smoother and more efficient vehicle operation. However, achieving autonomous docking for AMBs poses significant challenges, including the need for precise localization in both horizontal and vertical dimensions and the ability to manage dynamic persistent obstacles in close-range scenarios. Existing Light Detection and Ranging (LiDAR)-based Simultaneous Localization and Mapping (SLAM) algorithms, such as LIO-SAM, perform well in static environments but encounter limitations in dynamic scenarios, particularly with occlusions and vertical drift during AMB docking. In this paper, we propose an enhanced LiDAR-Inertial Measurement Unit (IMU) SLAM framework focused on improving localization accuracy and robustness during AMB docking. Key contributions include: (1) A two-stage scan-to-map matching method with ground constraints to reduce z-axis drift; (2) A factor graph optimization strategy integrating IMU roll and pitch constraints and periodic resetting to mitigate long-term drift; (3) A deep learning-based front vehicle detection and point cloud filtering mechanism to reduce occlusion effects. Experimental evaluations on single-vehicle and dual-vehicle datasets demonstrate that our method significantly reduces Absolute Pose Error (APE) and Relative Pose Error (RPE) compared to existing methods. These results highlight the framework's ability to address the unique challenges of AMB docking, therefore helping alleviate traffic congestion and reduce energy consumption.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


