{"title":"基于变分推理的多机动扩展目标跟踪自适应IMM算法","authors":"Shenghua Wang, Renxian Li, Chenkai Men, Yunhe Cao, Tat-Soon Yeo","doi":"10.1007/s42423-025-00173-7","DOIUrl":null,"url":null,"abstract":"<div><p>In order to track multiple maneuvering extended targets accurately, an adaptive interacting multiple model algorithm based on variational inference (AIMM-VI) is proposed. An augmented state is constructed to cater for time-varying orientation angle and track realistic shape changes, resulting in better elliptical shape estimation and tracking accuracy. Multiple measurements from multiple extended targets are effectively assigned to corresponding targets through the marginal association probability distribution criterion, and the variational inference is used to accurately estimate the augmented state and shape information, which greatly improves the parameters estimation performance. The residual and likelihood functions are updated in real-time according to the results of variational inference, allowing for the updating of the model probability in real-time. The Markov probability transfer matrix is subsequently adaptively updated by the compression ratio, which makes the algorithm more adaptable to maneuvering target and significantly improves the adaptability and robustness of the algorithm. The final simulation and experiment results show that the proposed algorithm can effectively improve the tracking performance of multiple maneuvering extended targets.</p></div>","PeriodicalId":100039,"journal":{"name":"Advances in Astronautics Science and Technology","volume":"8 1","pages":"73 - 87"},"PeriodicalIF":0.0000,"publicationDate":"2025-04-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Adaptive IMM Algorithm Based on Variational Inference for Multiple Maneuvering Extended Targets Tracking\",\"authors\":\"Shenghua Wang, Renxian Li, Chenkai Men, Yunhe Cao, Tat-Soon Yeo\",\"doi\":\"10.1007/s42423-025-00173-7\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>In order to track multiple maneuvering extended targets accurately, an adaptive interacting multiple model algorithm based on variational inference (AIMM-VI) is proposed. An augmented state is constructed to cater for time-varying orientation angle and track realistic shape changes, resulting in better elliptical shape estimation and tracking accuracy. Multiple measurements from multiple extended targets are effectively assigned to corresponding targets through the marginal association probability distribution criterion, and the variational inference is used to accurately estimate the augmented state and shape information, which greatly improves the parameters estimation performance. The residual and likelihood functions are updated in real-time according to the results of variational inference, allowing for the updating of the model probability in real-time. The Markov probability transfer matrix is subsequently adaptively updated by the compression ratio, which makes the algorithm more adaptable to maneuvering target and significantly improves the adaptability and robustness of the algorithm. The final simulation and experiment results show that the proposed algorithm can effectively improve the tracking performance of multiple maneuvering extended targets.</p></div>\",\"PeriodicalId\":100039,\"journal\":{\"name\":\"Advances in Astronautics Science and Technology\",\"volume\":\"8 1\",\"pages\":\"73 - 87\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-04-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Advances in Astronautics Science and Technology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42423-025-00173-7\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advances in Astronautics Science and Technology","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1007/s42423-025-00173-7","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Adaptive IMM Algorithm Based on Variational Inference for Multiple Maneuvering Extended Targets Tracking
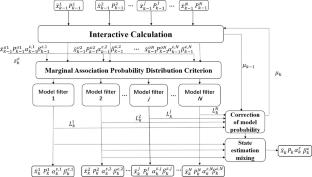
In order to track multiple maneuvering extended targets accurately, an adaptive interacting multiple model algorithm based on variational inference (AIMM-VI) is proposed. An augmented state is constructed to cater for time-varying orientation angle and track realistic shape changes, resulting in better elliptical shape estimation and tracking accuracy. Multiple measurements from multiple extended targets are effectively assigned to corresponding targets through the marginal association probability distribution criterion, and the variational inference is used to accurately estimate the augmented state and shape information, which greatly improves the parameters estimation performance. The residual and likelihood functions are updated in real-time according to the results of variational inference, allowing for the updating of the model probability in real-time. The Markov probability transfer matrix is subsequently adaptively updated by the compression ratio, which makes the algorithm more adaptable to maneuvering target and significantly improves the adaptability and robustness of the algorithm. The final simulation and experiment results show that the proposed algorithm can effectively improve the tracking performance of multiple maneuvering extended targets.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


