{"title":"基于鲁棒控制的汽车悬架系统主动控制","authors":"Ali Khudhair Al-Jiboory, Zaid S. Hammoudi","doi":"10.3103/S0146411625700026","DOIUrl":null,"url":null,"abstract":"<p>In this paper, we propose a novel robust state-feedback <span>\\({{\\mathcal{H}}_{\\infty }}\\)</span> control design method for active seat suspension systems, aiming to enhance passenger comfort in uncertain road conditions. Our approach minimizes the impact of road disturbances on vertical acceleration experienced by the human body, while explicitly considering constraints on suspension stroke deflection to ensure system reliability. We model the suspension system as a three degree-of-freedom (3-DOF) system and derive new synthesis conditions in terms of Linear Matrix Inequalities (LMIs). Simulation results demonstrate the superior performance of our strategy compared to a passive suspension system and a pole-placement controller, achieving a reduction in the peak of the maximum singular value from 57.107 to 4.554. Additionally, our controller reduces the maximum control force from 1000 <i>N</i> (for the pole-placement controller) to 640.5 <i>N</i>, indicating improved energy efficiency. These results highlight significant improvements in passenger comfort, suspension deflection management, and control effort.</p>","PeriodicalId":46238,"journal":{"name":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","volume":"59 1","pages":"13 - 26"},"PeriodicalIF":0.5000,"publicationDate":"2025-06-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Active Control of Vehicle Suspension System with Robust Control\",\"authors\":\"Ali Khudhair Al-Jiboory, Zaid S. Hammoudi\",\"doi\":\"10.3103/S0146411625700026\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In this paper, we propose a novel robust state-feedback <span>\\\\({{\\\\mathcal{H}}_{\\\\infty }}\\\\)</span> control design method for active seat suspension systems, aiming to enhance passenger comfort in uncertain road conditions. Our approach minimizes the impact of road disturbances on vertical acceleration experienced by the human body, while explicitly considering constraints on suspension stroke deflection to ensure system reliability. We model the suspension system as a three degree-of-freedom (3-DOF) system and derive new synthesis conditions in terms of Linear Matrix Inequalities (LMIs). Simulation results demonstrate the superior performance of our strategy compared to a passive suspension system and a pole-placement controller, achieving a reduction in the peak of the maximum singular value from 57.107 to 4.554. Additionally, our controller reduces the maximum control force from 1000 <i>N</i> (for the pole-placement controller) to 640.5 <i>N</i>, indicating improved energy efficiency. These results highlight significant improvements in passenger comfort, suspension deflection management, and control effort.</p>\",\"PeriodicalId\":46238,\"journal\":{\"name\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"volume\":\"59 1\",\"pages\":\"13 - 26\"},\"PeriodicalIF\":0.5000,\"publicationDate\":\"2025-06-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"AUTOMATIC CONTROL AND COMPUTER SCIENCES\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S0146411625700026\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"AUTOMATION & CONTROL SYSTEMS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"AUTOMATIC CONTROL AND COMPUTER SCIENCES","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S0146411625700026","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
Active Control of Vehicle Suspension System with Robust Control
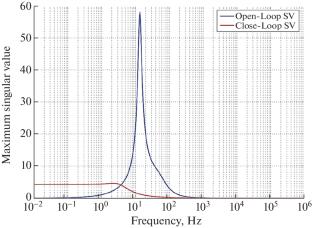
In this paper, we propose a novel robust state-feedback \({{\mathcal{H}}_{\infty }}\) control design method for active seat suspension systems, aiming to enhance passenger comfort in uncertain road conditions. Our approach minimizes the impact of road disturbances on vertical acceleration experienced by the human body, while explicitly considering constraints on suspension stroke deflection to ensure system reliability. We model the suspension system as a three degree-of-freedom (3-DOF) system and derive new synthesis conditions in terms of Linear Matrix Inequalities (LMIs). Simulation results demonstrate the superior performance of our strategy compared to a passive suspension system and a pole-placement controller, achieving a reduction in the peak of the maximum singular value from 57.107 to 4.554. Additionally, our controller reduces the maximum control force from 1000 N (for the pole-placement controller) to 640.5 N, indicating improved energy efficiency. These results highlight significant improvements in passenger comfort, suspension deflection management, and control effort.
期刊介绍:
Automatic Control and Computer Sciences is a peer reviewed journal that publishes articles on• Control systems, cyber-physical system, real-time systems, robotics, smart sensors, embedded intelligence • Network information technologies, information security, statistical methods of data processing, distributed artificial intelligence, complex systems modeling, knowledge representation, processing and management • Signal and image processing, machine learning, machine perception, computer vision

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


