{"title":"M3DMap:动态环境的对象感知多模态3D映射","authors":"D. A. Yudin","doi":"10.3103/S1060992X25700092","DOIUrl":null,"url":null,"abstract":"<p>3D mapping in dynamic environments poses a challenge for modern researchers in robotics and autonomous transportation. There are no universal representations for dynamic 3D scenes that incorporate multimodal data such as images, point clouds, and text. This article takes a step toward solving this problem. It proposes a taxonomy of methods for constructing multimodal 3D maps, classifying contemporary approaches based on scene types and representations, learning methods, and practical applications. Using this taxonomy, a brief structured analysis of recent methods is provided. The article also describes an original modular method called M3DMap, designed for object-aware construction of multimodal 3D maps for both static and dynamic scenes. It consists of several interconnected components: a neural multimodal object segmentation and tracking module; an odometry estimation module, including trainable algorithms; a module for 3D map construction and updating with various implementations depending on the desired scene representation; and a multimodal data retrieval module. The article highlights original implementations of these modules and their advantages in solving various practical tasks, from 3D object grounding to mobile manipulation. Additionally, it presents theoretical propositions demonstrating the positive effect of using multimodal data and modern foundational models in 3D mapping methods. Details of the taxonomy and method implementation are available at https://yuddim.github.io/M3DMap.</p>","PeriodicalId":721,"journal":{"name":"Optical Memory and Neural Networks","volume":"34 3","pages":"285 - 312"},"PeriodicalIF":0.8000,"publicationDate":"2025-09-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"M3DMap: Object-Aware Multimodal 3D Mapping for Dynamic Environments\",\"authors\":\"D. A. Yudin\",\"doi\":\"10.3103/S1060992X25700092\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>3D mapping in dynamic environments poses a challenge for modern researchers in robotics and autonomous transportation. There are no universal representations for dynamic 3D scenes that incorporate multimodal data such as images, point clouds, and text. This article takes a step toward solving this problem. It proposes a taxonomy of methods for constructing multimodal 3D maps, classifying contemporary approaches based on scene types and representations, learning methods, and practical applications. Using this taxonomy, a brief structured analysis of recent methods is provided. The article also describes an original modular method called M3DMap, designed for object-aware construction of multimodal 3D maps for both static and dynamic scenes. It consists of several interconnected components: a neural multimodal object segmentation and tracking module; an odometry estimation module, including trainable algorithms; a module for 3D map construction and updating with various implementations depending on the desired scene representation; and a multimodal data retrieval module. The article highlights original implementations of these modules and their advantages in solving various practical tasks, from 3D object grounding to mobile manipulation. Additionally, it presents theoretical propositions demonstrating the positive effect of using multimodal data and modern foundational models in 3D mapping methods. Details of the taxonomy and method implementation are available at https://yuddim.github.io/M3DMap.</p>\",\"PeriodicalId\":721,\"journal\":{\"name\":\"Optical Memory and Neural Networks\",\"volume\":\"34 3\",\"pages\":\"285 - 312\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2025-09-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Optical Memory and Neural Networks\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S1060992X25700092\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"OPTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optical Memory and Neural Networks","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S1060992X25700092","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"OPTICS","Score":null,"Total":0}
M3DMap: Object-Aware Multimodal 3D Mapping for Dynamic Environments
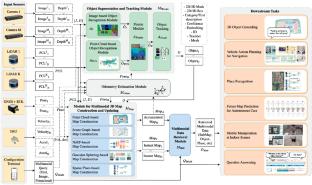
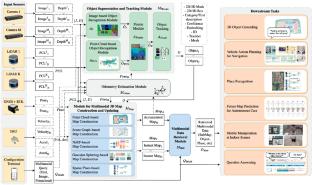
3D mapping in dynamic environments poses a challenge for modern researchers in robotics and autonomous transportation. There are no universal representations for dynamic 3D scenes that incorporate multimodal data such as images, point clouds, and text. This article takes a step toward solving this problem. It proposes a taxonomy of methods for constructing multimodal 3D maps, classifying contemporary approaches based on scene types and representations, learning methods, and practical applications. Using this taxonomy, a brief structured analysis of recent methods is provided. The article also describes an original modular method called M3DMap, designed for object-aware construction of multimodal 3D maps for both static and dynamic scenes. It consists of several interconnected components: a neural multimodal object segmentation and tracking module; an odometry estimation module, including trainable algorithms; a module for 3D map construction and updating with various implementations depending on the desired scene representation; and a multimodal data retrieval module. The article highlights original implementations of these modules and their advantages in solving various practical tasks, from 3D object grounding to mobile manipulation. Additionally, it presents theoretical propositions demonstrating the positive effect of using multimodal data and modern foundational models in 3D mapping methods. Details of the taxonomy and method implementation are available at https://yuddim.github.io/M3DMap.
期刊介绍:
The journal covers a wide range of issues in information optics such as optical memory, mechanisms for optical data recording and processing, photosensitive materials, optical, optoelectronic and holographic nanostructures, and many other related topics. Papers on memory systems using holographic and biological structures and concepts of brain operation are also included. The journal pays particular attention to research in the field of neural net systems that may lead to a new generation of computional technologies by endowing them with intelligence.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


