从问题到路线:Multi-AMR导航终身学习的合作成本图
IF 10.4
1区 计算机科学
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
摘要
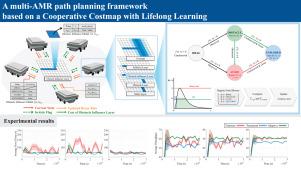
在部署多自主移动机器人(AMR)系统的大规模工业环境中,不可预测的障碍物会严重破坏自主移动机器人的导航,阻碍任务的执行。为了克服这种中断,amr必须经常实时重新规划路线,这通常会导致次优轨迹。本文提出了一种基于终身学习的合作成本图的多amr路径规划框架,旨在实现即使在障碍物模式先验未知的环境下也能高效导航。受社会网络理论中的问题传播模型的启发,该模型描述了公众注意力在网络中如何随着时间的推移而上升和消退,提出的方法模拟了遇到障碍的时间影响,允许预测路径规划,以适应不断变化的障碍模式。该框架包含终身学习机制,以随着时间的推移逐步完善影响参数,从而确保在动态工业环境中的适应性。仿真实验表明,与标准ROS 2导航堆栈相比,该方法将任务吞吐量提高了18.0%,平均行程时间减少了30.1%。本文章由计算机程序翻译,如有差异,请以英文原文为准。
From issues to routes: A cooperative costmap with lifelong learning for Multi-AMR navigation
In large-scale industrial environments where multi-AMR (Autonomous Mobile Robot) systems are deployed, the unpredictable occurrence of obstacles can significantly disrupt AMR navigation, hindering task execution. To overcome such disruptions, AMRs must frequently replan their routes in real time, often resulting in suboptimal trajectories. This paper proposes a multi-AMR path planning framework based on a Cooperative Costmap with Lifelong Learning, designed to enable efficient navigation even in environments where obstacle patterns are not known a priori. Inspired by issue-propagation models in social-network theory — which describe how public attention rises and fades over time within a network — the proposed approach models the temporal influence of encountered obstacles, allowing predictive path planning that adapts to changing obstacle patterns. The framework incorporates a lifelong learning mechanism to incrementally refine the influence parameter over time, thus ensuring adaptability in dynamic industrial settings. Simulation experiments demonstrate that the proposed approach increases task throughput by up to 18.0% and reduces average travel time by up to 30.1% compared to the standard ROS 2 navigation stack.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Journal of Industrial Information Integration
Decision Sciences-Information Systems and Management
CiteScore
22.30
自引率
13.40%
发文量
100
期刊介绍:
The Journal of Industrial Information Integration focuses on the industry's transition towards industrial integration and informatization, covering not only hardware and software but also information integration. It serves as a platform for promoting advances in industrial information integration, addressing challenges, issues, and solutions in an interdisciplinary forum for researchers, practitioners, and policy makers.
The Journal of Industrial Information Integration welcomes papers on foundational, technical, and practical aspects of industrial information integration, emphasizing the complex and cross-disciplinary topics that arise in industrial integration. Techniques from mathematical science, computer science, computer engineering, electrical and electronic engineering, manufacturing engineering, and engineering management are crucial in this context.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


