{"title":"宽场声学启发式:改进的麦克风阵列设计,用于回声定位蝙蝠的精确空间跟踪。","authors":"Ravi Umadi","doi":"10.1186/s12862-025-02441-4","DOIUrl":null,"url":null,"abstract":"<p><p>Accurate three-dimensional localisation of ultrasonic bat calls is essential for advancing behavioural and ecological research. I present a comprehensive, open-source simulation framework-Array WAH-for designing, evaluating, and optimising microphone arrays tailored to bioacoustic tracking. The tool incorporates biologically realistic signal generation, frequency-dependent propagation, and advanced Time Difference of Arrival (TDoA) localisation algorithms, enabling precise quantification of both positional and angular accuracy. The framework supports both frequency-modulated (FM) and constant-frequency (CF) call types, the latter characteristic of Hipposiderid and Rhinolophid bats, which are particularly prone to localisation errors due to their long-duration emissions. A key innovation is the integration of source motion modelling during call emission, which introduces Doppler-based time warping and phase shifts across microphones-an important and often overlooked source of error in source localisation. I systematically compare four array geometries-a planar square, a pyramid, a tetrahedron, and an octahedron-across a volumetric spatial grid. The tetrahedral and octahedral configurations demonstrate superior localisation robustness, while planar arrays exhibit limited angular resolution. My simulations reveal that spatial resolution is fundamentally constrained by array geometry and the signal structure, with typical localisation error ranging between 5-10 cm at 0.5 m arm lengths. By providing a flexible, extensible, and user-friendly simulation environment, Array WAH supports task-specific design and deployment of compact, field-deployable localisation systems. It is especially valuable for investigating the acoustic behaviour of free-flying bats under naturalistic conditions, and complements emerging low-power multichannel ultrasonic recorders for field deployment and method validation.</p>","PeriodicalId":93910,"journal":{"name":"BMC ecology and evolution","volume":"25 1","pages":"92"},"PeriodicalIF":2.6000,"publicationDate":"2025-09-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12418663/pdf/","citationCount":"0","resultStr":"{\"title\":\"Widefield acoustics heuristic: advancing microphone array design for accurate spatial tracking of echolocating bats.\",\"authors\":\"Ravi Umadi\",\"doi\":\"10.1186/s12862-025-02441-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Accurate three-dimensional localisation of ultrasonic bat calls is essential for advancing behavioural and ecological research. I present a comprehensive, open-source simulation framework-Array WAH-for designing, evaluating, and optimising microphone arrays tailored to bioacoustic tracking. The tool incorporates biologically realistic signal generation, frequency-dependent propagation, and advanced Time Difference of Arrival (TDoA) localisation algorithms, enabling precise quantification of both positional and angular accuracy. The framework supports both frequency-modulated (FM) and constant-frequency (CF) call types, the latter characteristic of Hipposiderid and Rhinolophid bats, which are particularly prone to localisation errors due to their long-duration emissions. A key innovation is the integration of source motion modelling during call emission, which introduces Doppler-based time warping and phase shifts across microphones-an important and often overlooked source of error in source localisation. I systematically compare four array geometries-a planar square, a pyramid, a tetrahedron, and an octahedron-across a volumetric spatial grid. The tetrahedral and octahedral configurations demonstrate superior localisation robustness, while planar arrays exhibit limited angular resolution. My simulations reveal that spatial resolution is fundamentally constrained by array geometry and the signal structure, with typical localisation error ranging between 5-10 cm at 0.5 m arm lengths. By providing a flexible, extensible, and user-friendly simulation environment, Array WAH supports task-specific design and deployment of compact, field-deployable localisation systems. It is especially valuable for investigating the acoustic behaviour of free-flying bats under naturalistic conditions, and complements emerging low-power multichannel ultrasonic recorders for field deployment and method validation.</p>\",\"PeriodicalId\":93910,\"journal\":{\"name\":\"BMC ecology and evolution\",\"volume\":\"25 1\",\"pages\":\"92\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2025-09-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12418663/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"BMC ecology and evolution\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s12862-025-02441-4\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ECOLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"BMC ecology and evolution","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s12862-025-02441-4","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ECOLOGY","Score":null,"Total":0}
Widefield acoustics heuristic: advancing microphone array design for accurate spatial tracking of echolocating bats.
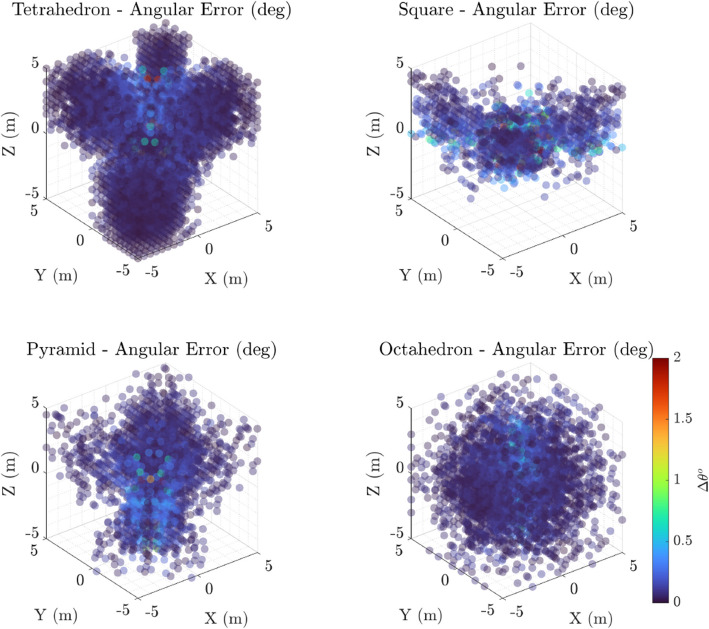
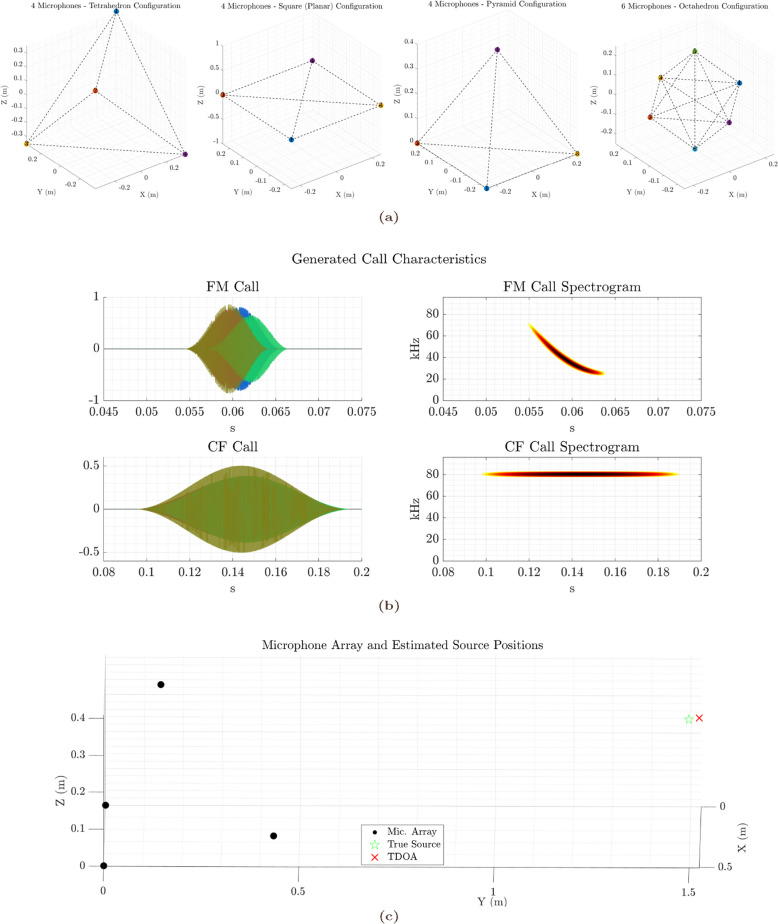
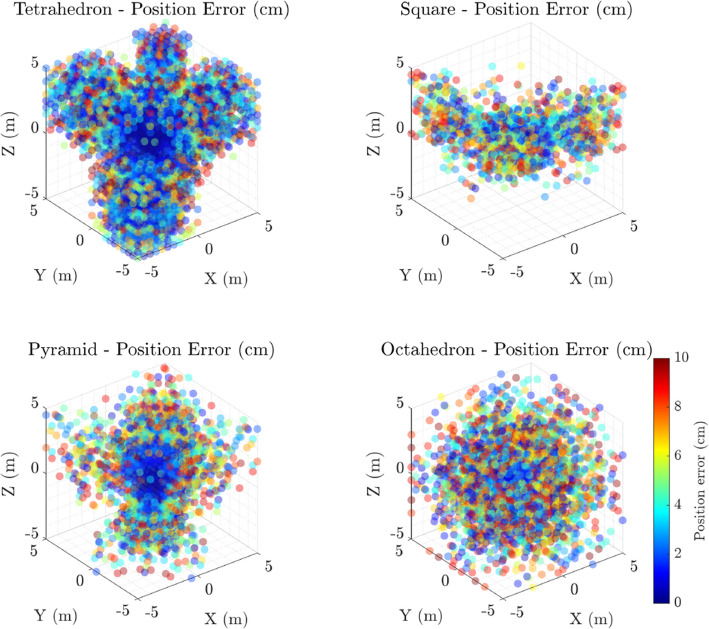
Accurate three-dimensional localisation of ultrasonic bat calls is essential for advancing behavioural and ecological research. I present a comprehensive, open-source simulation framework-Array WAH-for designing, evaluating, and optimising microphone arrays tailored to bioacoustic tracking. The tool incorporates biologically realistic signal generation, frequency-dependent propagation, and advanced Time Difference of Arrival (TDoA) localisation algorithms, enabling precise quantification of both positional and angular accuracy. The framework supports both frequency-modulated (FM) and constant-frequency (CF) call types, the latter characteristic of Hipposiderid and Rhinolophid bats, which are particularly prone to localisation errors due to their long-duration emissions. A key innovation is the integration of source motion modelling during call emission, which introduces Doppler-based time warping and phase shifts across microphones-an important and often overlooked source of error in source localisation. I systematically compare four array geometries-a planar square, a pyramid, a tetrahedron, and an octahedron-across a volumetric spatial grid. The tetrahedral and octahedral configurations demonstrate superior localisation robustness, while planar arrays exhibit limited angular resolution. My simulations reveal that spatial resolution is fundamentally constrained by array geometry and the signal structure, with typical localisation error ranging between 5-10 cm at 0.5 m arm lengths. By providing a flexible, extensible, and user-friendly simulation environment, Array WAH supports task-specific design and deployment of compact, field-deployable localisation systems. It is especially valuable for investigating the acoustic behaviour of free-flying bats under naturalistic conditions, and complements emerging low-power multichannel ultrasonic recorders for field deployment and method validation.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


