Baolu Li , Ping Liu , Lan Fu , Jinlong Li , Jianwu Fang , Zhigang Xu , Hongkai Yu
{"title":"基于对柔性位姿制导的车辆图像合成增强车辆再识别","authors":"Baolu Li , Ping Liu , Lan Fu , Jinlong Li , Jianwu Fang , Zhigang Xu , Hongkai Yu","doi":"10.1016/j.geits.2025.100269","DOIUrl":null,"url":null,"abstract":"<div><div>Vehicle Re-identification (Re-ID) has drawn extensive exploration recently; nevertheless, the issue of accurately distinguishing features in latent space across varying vehicle poses, remains a challenging hurdle for real-world application of Vehicle Re-ID. To address this challenge, we supply a novel idea which projects the various-pose vehicle images into a unified target pose so as to promote the discriminative capability of vehicle Re-ID model. Acknowledging the labor and cost of paired data for the same vehicle images across different traffic surveillance cameras in practical scenarios, we propose the pioneering Pair-flexible Pose Guided Image Synthesis for vehicle Re-ID, denominated as VehicleGAN. Our method is adept at both supervised (paired images of same vehicle) and unsupervised (unpaired images of any vehicle) settings, and bypasses the need of geometric 3D model information. Furthermore, we propose a novel Joint Metric Learning (JML) method to facilitate the effective fusion of both real and synthetic data. Comprehensive experimental analyses conducted on the public VeRi-776 and VehicleID datasets substantiate the precision and efficacy of our proposed VehicleGAN and JML.</div></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"4 5","pages":"Article 100269"},"PeriodicalIF":16.4000,"publicationDate":"2025-01-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Enhancing vehicle Re-identification by pair-flexible pose guided vehicle image synthesis\",\"authors\":\"Baolu Li , Ping Liu , Lan Fu , Jinlong Li , Jianwu Fang , Zhigang Xu , Hongkai Yu\",\"doi\":\"10.1016/j.geits.2025.100269\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><div>Vehicle Re-identification (Re-ID) has drawn extensive exploration recently; nevertheless, the issue of accurately distinguishing features in latent space across varying vehicle poses, remains a challenging hurdle for real-world application of Vehicle Re-ID. To address this challenge, we supply a novel idea which projects the various-pose vehicle images into a unified target pose so as to promote the discriminative capability of vehicle Re-ID model. Acknowledging the labor and cost of paired data for the same vehicle images across different traffic surveillance cameras in practical scenarios, we propose the pioneering Pair-flexible Pose Guided Image Synthesis for vehicle Re-ID, denominated as VehicleGAN. Our method is adept at both supervised (paired images of same vehicle) and unsupervised (unpaired images of any vehicle) settings, and bypasses the need of geometric 3D model information. Furthermore, we propose a novel Joint Metric Learning (JML) method to facilitate the effective fusion of both real and synthetic data. Comprehensive experimental analyses conducted on the public VeRi-776 and VehicleID datasets substantiate the precision and efficacy of our proposed VehicleGAN and JML.</div></div>\",\"PeriodicalId\":100596,\"journal\":{\"name\":\"Green Energy and Intelligent Transportation\",\"volume\":\"4 5\",\"pages\":\"Article 100269\"},\"PeriodicalIF\":16.4000,\"publicationDate\":\"2025-01-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Green Energy and Intelligent Transportation\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://www.sciencedirect.com/science/article/pii/S2773153725000192\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153725000192","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Enhancing vehicle Re-identification by pair-flexible pose guided vehicle image synthesis
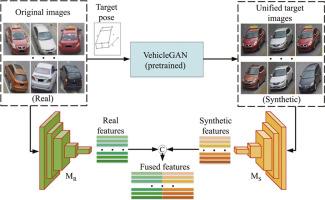
Vehicle Re-identification (Re-ID) has drawn extensive exploration recently; nevertheless, the issue of accurately distinguishing features in latent space across varying vehicle poses, remains a challenging hurdle for real-world application of Vehicle Re-ID. To address this challenge, we supply a novel idea which projects the various-pose vehicle images into a unified target pose so as to promote the discriminative capability of vehicle Re-ID model. Acknowledging the labor and cost of paired data for the same vehicle images across different traffic surveillance cameras in practical scenarios, we propose the pioneering Pair-flexible Pose Guided Image Synthesis for vehicle Re-ID, denominated as VehicleGAN. Our method is adept at both supervised (paired images of same vehicle) and unsupervised (unpaired images of any vehicle) settings, and bypasses the need of geometric 3D model information. Furthermore, we propose a novel Joint Metric Learning (JML) method to facilitate the effective fusion of both real and synthetic data. Comprehensive experimental analyses conducted on the public VeRi-776 and VehicleID datasets substantiate the precision and efficacy of our proposed VehicleGAN and JML.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


