{"title":"面向圆形医疗保健的基于热力学深度学习视觉的柔性机器人单元。","authors":"Federico Zocco, Denis Sleath, Shahin Rahimifard","doi":"10.1007/s43615-025-00532-4","DOIUrl":null,"url":null,"abstract":"<p><p>The dependence on finite reserves of raw materials and the generation of waste are two unsolved problems of the traditional linear economy. Healthcare, as a major sector of any nation, is currently facing them. In addition, the reprocessing of healthcare waste poses humans at risk of contamination. Another open issue is that circular economy, which is a paradigm that is being proposed to address material supply uncertainties and waste generation, still lacks physics-based modeling approaches that enable the design and analysis of circular flows of materials. Hence, in this paper, first we report on the on-going development of a flexible robotic cell enabled by deep-learning vision for automating three main tasks in a circular healthcare, namely, resources mapping and quantification, disassembly, and waste sorting of small medical devices. Second, we combine compartmental dynamical thermodynamics with the mechanics of robots to integrate robotics into a system-level perspective. Our thermodynamic framework is a step forward in defining the theoretical foundations of circular material flow designs because it enhances material flow analysis (MFA) by adding dynamical energy balances to the usual mass balances and by leveraging dynamical systems theory. Third, we propose two circularity indicators by leveraging our thermodynamic framework and graph theory. While our initial set-up of the robotic cell is for reprocessing glucose meters and inhalers, other medical devices can be considered after making the proper adaptations; in addition, it can switch from sorting to disassembly to resources mapping and quantification, or run them in parallel. Our thermodynamic systemic modeling framework involves more physics and system dynamics than MFA, and hence, can yield the needed improvements in model accuracy and reproducibility at the cost of extra complexity. Finally, the proposed circularity indicators can help healthcare chain managers in assessing whether the robotic cell can process the input stream of materials within the desired time and with the desired level of separation at the output material flow. Software and a demo video are publicly available.</p>","PeriodicalId":72595,"journal":{"name":"Circular economy and sustainability","volume":"5 4","pages":"3187-3209"},"PeriodicalIF":0.0000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12380972/pdf/","citationCount":"0","resultStr":"{\"title\":\"Towards a Thermodynamical Deep-Learning-Vision-Based Flexible Robotic Cell for Circular Healthcare.\",\"authors\":\"Federico Zocco, Denis Sleath, Shahin Rahimifard\",\"doi\":\"10.1007/s43615-025-00532-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The dependence on finite reserves of raw materials and the generation of waste are two unsolved problems of the traditional linear economy. Healthcare, as a major sector of any nation, is currently facing them. In addition, the reprocessing of healthcare waste poses humans at risk of contamination. Another open issue is that circular economy, which is a paradigm that is being proposed to address material supply uncertainties and waste generation, still lacks physics-based modeling approaches that enable the design and analysis of circular flows of materials. Hence, in this paper, first we report on the on-going development of a flexible robotic cell enabled by deep-learning vision for automating three main tasks in a circular healthcare, namely, resources mapping and quantification, disassembly, and waste sorting of small medical devices. Second, we combine compartmental dynamical thermodynamics with the mechanics of robots to integrate robotics into a system-level perspective. Our thermodynamic framework is a step forward in defining the theoretical foundations of circular material flow designs because it enhances material flow analysis (MFA) by adding dynamical energy balances to the usual mass balances and by leveraging dynamical systems theory. Third, we propose two circularity indicators by leveraging our thermodynamic framework and graph theory. While our initial set-up of the robotic cell is for reprocessing glucose meters and inhalers, other medical devices can be considered after making the proper adaptations; in addition, it can switch from sorting to disassembly to resources mapping and quantification, or run them in parallel. Our thermodynamic systemic modeling framework involves more physics and system dynamics than MFA, and hence, can yield the needed improvements in model accuracy and reproducibility at the cost of extra complexity. Finally, the proposed circularity indicators can help healthcare chain managers in assessing whether the robotic cell can process the input stream of materials within the desired time and with the desired level of separation at the output material flow. Software and a demo video are publicly available.</p>\",\"PeriodicalId\":72595,\"journal\":{\"name\":\"Circular economy and sustainability\",\"volume\":\"5 4\",\"pages\":\"3187-3209\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12380972/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Circular economy and sustainability\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s43615-025-00532-4\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/4/2 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Circular economy and sustainability","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s43615-025-00532-4","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/4/2 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Towards a Thermodynamical Deep-Learning-Vision-Based Flexible Robotic Cell for Circular Healthcare.
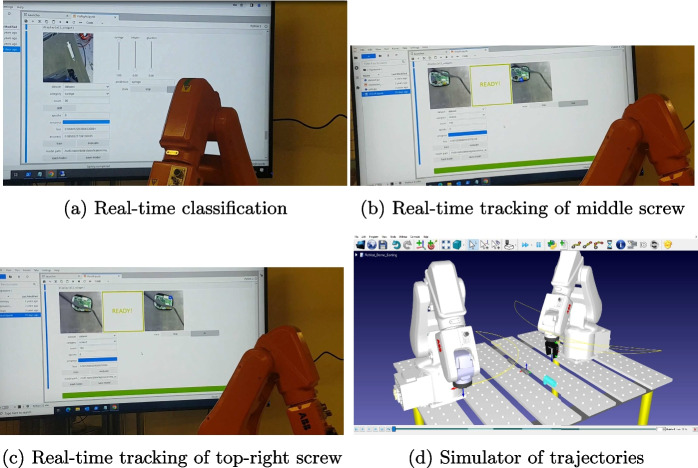
The dependence on finite reserves of raw materials and the generation of waste are two unsolved problems of the traditional linear economy. Healthcare, as a major sector of any nation, is currently facing them. In addition, the reprocessing of healthcare waste poses humans at risk of contamination. Another open issue is that circular economy, which is a paradigm that is being proposed to address material supply uncertainties and waste generation, still lacks physics-based modeling approaches that enable the design and analysis of circular flows of materials. Hence, in this paper, first we report on the on-going development of a flexible robotic cell enabled by deep-learning vision for automating three main tasks in a circular healthcare, namely, resources mapping and quantification, disassembly, and waste sorting of small medical devices. Second, we combine compartmental dynamical thermodynamics with the mechanics of robots to integrate robotics into a system-level perspective. Our thermodynamic framework is a step forward in defining the theoretical foundations of circular material flow designs because it enhances material flow analysis (MFA) by adding dynamical energy balances to the usual mass balances and by leveraging dynamical systems theory. Third, we propose two circularity indicators by leveraging our thermodynamic framework and graph theory. While our initial set-up of the robotic cell is for reprocessing glucose meters and inhalers, other medical devices can be considered after making the proper adaptations; in addition, it can switch from sorting to disassembly to resources mapping and quantification, or run them in parallel. Our thermodynamic systemic modeling framework involves more physics and system dynamics than MFA, and hence, can yield the needed improvements in model accuracy and reproducibility at the cost of extra complexity. Finally, the proposed circularity indicators can help healthcare chain managers in assessing whether the robotic cell can process the input stream of materials within the desired time and with the desired level of separation at the output material flow. Software and a demo video are publicly available.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


