{"title":"基于ransac的颅颌面CT图像外附标记球检测与估计新方法。","authors":"Yonghui Li, Han Zhang, Weili Shi, Wei He, Yu Miao, Guodong Wei, Zhengang Jiang","doi":"10.21037/qims-2025-386","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>The precision of image-physical space registration using spherical markers in craniomaxillofacial surgical navigation significantly depends on the accurate estimation of spherical parameters from computed tomography (CT) images. However, this estimation is susceptible to the abnormal points caused by artifacts, instruments interference, and other factors. To address these challenges, this study proposes a robust method to improve reproducibility in results and achieve higher accuracy on low inlier ratio data, thereby meeting the requirements of high-precision surgical applications.</p><p><strong>Methods: </strong>Firstly, potential marker sphere regions are isolated from CT images. Next, we propose the Local Evaluation and Optimization RANdom SAmple Consensus (LEO-RANSAC) algorithm to refine the detection of the spherical parameters. This technique introduces a metric that combines multi-level adaptive curvature and local solution to filter local models, and adopts an equidistance adjustment mechanism to improve the accuracy of the so-far-the-best model. Lastly, a custom-designed equipment is utilized to measure the fiducial localization error (FLE), and a skull phantom study is utilized to evaluate the fiducial registration error (FRE) and the target registration error (TRE).</p><p><strong>Results: </strong>The proposed method was evaluated on 72-point clouds with inlier ratio ranging from 30% to 90%. After repeating 100 independent experiments, the deviations of the maximum of FLEs for six different configurations were 0.40±0.25, 0.52±0.35, 0.58±0.35, 0.53±0.25, 0.51±0.28, and 0.39±0.31 mm, respectively. Analysis of 72 results showed that 87.50% of the maximum of FLEs were less than 0.9 mm, and 95.83% of the variances of FLEs were less than 0.01. In a skull phantom study involving 3 different datasets, the FREs were 0.4222, 0.5223, and 0.372 mm, respectively, whereas the TREs were 0.8546, 0.9471, and 0.8537 mm during real-time guidance, respectively.</p><p><strong>Conclusions: </strong>The results demonstrate that our method outperforms existing approaches in terms of accuracy and reliability, highlighting its potential applicability in craniomaxillofacial surgical navigation.</p>","PeriodicalId":54267,"journal":{"name":"Quantitative Imaging in Medicine and Surgery","volume":"15 9","pages":"8023-8039"},"PeriodicalIF":2.3000,"publicationDate":"2025-09-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12397674/pdf/","citationCount":"0","resultStr":"{\"title\":\"Novel RANSAC-based method for detecting and estimating externally attached marker spheres in craniomaxillofacial CT images.\",\"authors\":\"Yonghui Li, Han Zhang, Weili Shi, Wei He, Yu Miao, Guodong Wei, Zhengang Jiang\",\"doi\":\"10.21037/qims-2025-386\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>The precision of image-physical space registration using spherical markers in craniomaxillofacial surgical navigation significantly depends on the accurate estimation of spherical parameters from computed tomography (CT) images. However, this estimation is susceptible to the abnormal points caused by artifacts, instruments interference, and other factors. To address these challenges, this study proposes a robust method to improve reproducibility in results and achieve higher accuracy on low inlier ratio data, thereby meeting the requirements of high-precision surgical applications.</p><p><strong>Methods: </strong>Firstly, potential marker sphere regions are isolated from CT images. Next, we propose the Local Evaluation and Optimization RANdom SAmple Consensus (LEO-RANSAC) algorithm to refine the detection of the spherical parameters. This technique introduces a metric that combines multi-level adaptive curvature and local solution to filter local models, and adopts an equidistance adjustment mechanism to improve the accuracy of the so-far-the-best model. Lastly, a custom-designed equipment is utilized to measure the fiducial localization error (FLE), and a skull phantom study is utilized to evaluate the fiducial registration error (FRE) and the target registration error (TRE).</p><p><strong>Results: </strong>The proposed method was evaluated on 72-point clouds with inlier ratio ranging from 30% to 90%. After repeating 100 independent experiments, the deviations of the maximum of FLEs for six different configurations were 0.40±0.25, 0.52±0.35, 0.58±0.35, 0.53±0.25, 0.51±0.28, and 0.39±0.31 mm, respectively. Analysis of 72 results showed that 87.50% of the maximum of FLEs were less than 0.9 mm, and 95.83% of the variances of FLEs were less than 0.01. In a skull phantom study involving 3 different datasets, the FREs were 0.4222, 0.5223, and 0.372 mm, respectively, whereas the TREs were 0.8546, 0.9471, and 0.8537 mm during real-time guidance, respectively.</p><p><strong>Conclusions: </strong>The results demonstrate that our method outperforms existing approaches in terms of accuracy and reliability, highlighting its potential applicability in craniomaxillofacial surgical navigation.</p>\",\"PeriodicalId\":54267,\"journal\":{\"name\":\"Quantitative Imaging in Medicine and Surgery\",\"volume\":\"15 9\",\"pages\":\"8023-8039\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2025-09-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12397674/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Quantitative Imaging in Medicine and Surgery\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.21037/qims-2025-386\",\"RegionNum\":2,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/8/19 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"RADIOLOGY, NUCLEAR MEDICINE & MEDICAL IMAGING\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Quantitative Imaging in Medicine and Surgery","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.21037/qims-2025-386","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/8/19 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"RADIOLOGY, NUCLEAR MEDICINE & MEDICAL IMAGING","Score":null,"Total":0}
Novel RANSAC-based method for detecting and estimating externally attached marker spheres in craniomaxillofacial CT images.
Background: The precision of image-physical space registration using spherical markers in craniomaxillofacial surgical navigation significantly depends on the accurate estimation of spherical parameters from computed tomography (CT) images. However, this estimation is susceptible to the abnormal points caused by artifacts, instruments interference, and other factors. To address these challenges, this study proposes a robust method to improve reproducibility in results and achieve higher accuracy on low inlier ratio data, thereby meeting the requirements of high-precision surgical applications.
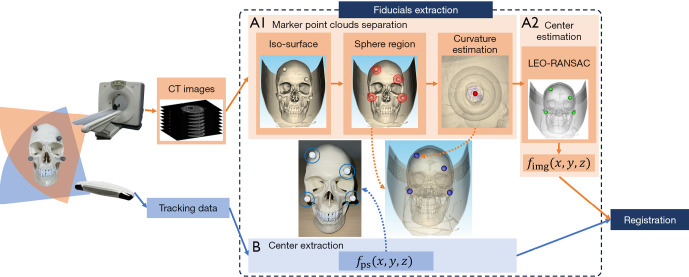
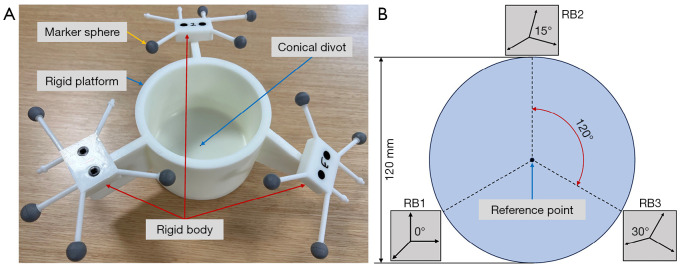
Methods: Firstly, potential marker sphere regions are isolated from CT images. Next, we propose the Local Evaluation and Optimization RANdom SAmple Consensus (LEO-RANSAC) algorithm to refine the detection of the spherical parameters. This technique introduces a metric that combines multi-level adaptive curvature and local solution to filter local models, and adopts an equidistance adjustment mechanism to improve the accuracy of the so-far-the-best model. Lastly, a custom-designed equipment is utilized to measure the fiducial localization error (FLE), and a skull phantom study is utilized to evaluate the fiducial registration error (FRE) and the target registration error (TRE).
Results: The proposed method was evaluated on 72-point clouds with inlier ratio ranging from 30% to 90%. After repeating 100 independent experiments, the deviations of the maximum of FLEs for six different configurations were 0.40±0.25, 0.52±0.35, 0.58±0.35, 0.53±0.25, 0.51±0.28, and 0.39±0.31 mm, respectively. Analysis of 72 results showed that 87.50% of the maximum of FLEs were less than 0.9 mm, and 95.83% of the variances of FLEs were less than 0.01. In a skull phantom study involving 3 different datasets, the FREs were 0.4222, 0.5223, and 0.372 mm, respectively, whereas the TREs were 0.8546, 0.9471, and 0.8537 mm during real-time guidance, respectively.
Conclusions: The results demonstrate that our method outperforms existing approaches in terms of accuracy and reliability, highlighting its potential applicability in craniomaxillofacial surgical navigation.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


