Christian Tamantini, Alessandro Umbrico, Andrea Orlandini
{"title":"机器人辅助康复中的自动计划和调度:综述。","authors":"Christian Tamantini, Alessandro Umbrico, Andrea Orlandini","doi":"10.1186/s12984-025-01710-z","DOIUrl":null,"url":null,"abstract":"<p><p>Robotic systems are increasingly utilized in rehabilitation contexts, offering tailored support for physical and cognitive functions. Enabling these systems to autonomously personalize treatments entails a critical role for automated planning and scheduling methodologies. However, a comprehensive review to map the control architectures of robotic rehabilitation systems that leverage automated planning for long-term customization is lacking, addressing a key gap in the literature. To bridge such a gap, this review systematically analyzed 26 studies retrieved from scientific databases after a careful selection performed following PRISMA guidelines. The search focused on works employing automated planning in robot-aided rehabilitation across physical and cognitive domains, as well as multi-user robotic environments. Papers were selected based on predefined criteria, including relevance to automated planning, peer-reviewed publication, and a focus on robotic systems in rehabilitation. The discussion highlights the primary similarities and differences in control architectures, adaptation strategies, and validation approaches among the reviewed systems. This review emphasizes the potential of automated planning to enhance personalization and adaptability in robotic rehabilitation, offering a foundation for more efficient and patient-centered therapeutic solutions.</p>","PeriodicalId":16384,"journal":{"name":"Journal of NeuroEngineering and Rehabilitation","volume":"22 1","pages":"180"},"PeriodicalIF":5.2000,"publicationDate":"2025-08-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12363123/pdf/","citationCount":"0","resultStr":"{\"title\":\"Automated planning and scheduling in robot-aided rehabilitation: a review.\",\"authors\":\"Christian Tamantini, Alessandro Umbrico, Andrea Orlandini\",\"doi\":\"10.1186/s12984-025-01710-z\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Robotic systems are increasingly utilized in rehabilitation contexts, offering tailored support for physical and cognitive functions. Enabling these systems to autonomously personalize treatments entails a critical role for automated planning and scheduling methodologies. However, a comprehensive review to map the control architectures of robotic rehabilitation systems that leverage automated planning for long-term customization is lacking, addressing a key gap in the literature. To bridge such a gap, this review systematically analyzed 26 studies retrieved from scientific databases after a careful selection performed following PRISMA guidelines. The search focused on works employing automated planning in robot-aided rehabilitation across physical and cognitive domains, as well as multi-user robotic environments. Papers were selected based on predefined criteria, including relevance to automated planning, peer-reviewed publication, and a focus on robotic systems in rehabilitation. The discussion highlights the primary similarities and differences in control architectures, adaptation strategies, and validation approaches among the reviewed systems. This review emphasizes the potential of automated planning to enhance personalization and adaptability in robotic rehabilitation, offering a foundation for more efficient and patient-centered therapeutic solutions.</p>\",\"PeriodicalId\":16384,\"journal\":{\"name\":\"Journal of NeuroEngineering and Rehabilitation\",\"volume\":\"22 1\",\"pages\":\"180\"},\"PeriodicalIF\":5.2000,\"publicationDate\":\"2025-08-18\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12363123/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of NeuroEngineering and Rehabilitation\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1186/s12984-025-01710-z\",\"RegionNum\":2,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of NeuroEngineering and Rehabilitation","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12984-025-01710-z","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Automated planning and scheduling in robot-aided rehabilitation: a review.
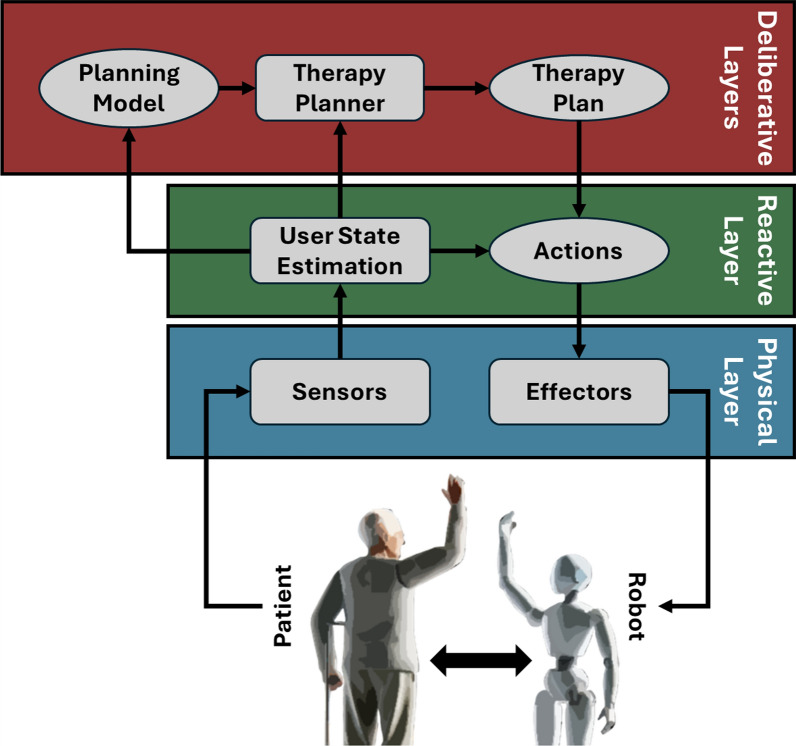
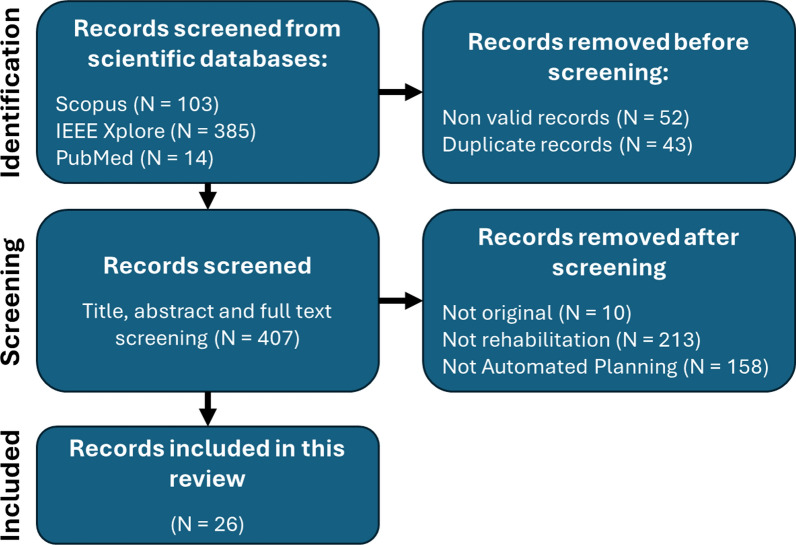
Robotic systems are increasingly utilized in rehabilitation contexts, offering tailored support for physical and cognitive functions. Enabling these systems to autonomously personalize treatments entails a critical role for automated planning and scheduling methodologies. However, a comprehensive review to map the control architectures of robotic rehabilitation systems that leverage automated planning for long-term customization is lacking, addressing a key gap in the literature. To bridge such a gap, this review systematically analyzed 26 studies retrieved from scientific databases after a careful selection performed following PRISMA guidelines. The search focused on works employing automated planning in robot-aided rehabilitation across physical and cognitive domains, as well as multi-user robotic environments. Papers were selected based on predefined criteria, including relevance to automated planning, peer-reviewed publication, and a focus on robotic systems in rehabilitation. The discussion highlights the primary similarities and differences in control architectures, adaptation strategies, and validation approaches among the reviewed systems. This review emphasizes the potential of automated planning to enhance personalization and adaptability in robotic rehabilitation, offering a foundation for more efficient and patient-centered therapeutic solutions.
期刊介绍:
Journal of NeuroEngineering and Rehabilitation considers manuscripts on all aspects of research that result from cross-fertilization of the fields of neuroscience, biomedical engineering, and physical medicine & rehabilitation.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


