I. A. Lubashevsky, V. I. Lubashevskiy, N. G. Gusein-zade
{"title":"动态陷阱和行动点的概念","authors":"I. A. Lubashevsky, V. I. Lubashevskiy, N. G. Gusein-zade","doi":"10.3103/S1068335625602316","DOIUrl":null,"url":null,"abstract":"<p>Within the paradigm of intermittent human control, we propose a novel model of dynamical traps to describe the balancing of a dynamical system near its unstable equilibrium. The core of this model is probabilistic, featuring alternating transitions between two behavioral modes of the subject – active and passive phases – in regulating the dynamics of the controlled object. These modes are delineated by action points, which represent the moments when the subject decides to switch between modes. This switching behavior is modeled using an original stochastic differential equation. Within this approach, action points are conceptualized as stepwise transitions in a special variable, <span>\\(\\zeta \\)</span>, which switches between two boundary values: <span>\\(\\zeta = 0\\)</span> and <span>\\(\\zeta = 1\\)</span>. The introduced trap function, <span>\\(\\Omega (\\Delta )\\)</span>, quantifies the subject’s perception of the object’s deviation from the unstable equilibrium or a desired state, thereby determining the current priority of the two behavioral modes. Crucially, these transitions— action points—occur before the trap function reaches its extreme values, <span>\\(\\Omega (\\Delta ) = 0\\)</span> or <span>\\(\\Omega (\\Delta ) = 1\\)</span>, underscoring the probabilistic nature of intermittent human control.</p>","PeriodicalId":503,"journal":{"name":"Bulletin of the Lebedev Physics Institute","volume":"52 7","pages":"338 - 345"},"PeriodicalIF":0.7000,"publicationDate":"2025-08-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Concept of Dynamical Traps and Action Points\",\"authors\":\"I. A. Lubashevsky, V. I. Lubashevskiy, N. G. Gusein-zade\",\"doi\":\"10.3103/S1068335625602316\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Within the paradigm of intermittent human control, we propose a novel model of dynamical traps to describe the balancing of a dynamical system near its unstable equilibrium. The core of this model is probabilistic, featuring alternating transitions between two behavioral modes of the subject – active and passive phases – in regulating the dynamics of the controlled object. These modes are delineated by action points, which represent the moments when the subject decides to switch between modes. This switching behavior is modeled using an original stochastic differential equation. Within this approach, action points are conceptualized as stepwise transitions in a special variable, <span>\\\\(\\\\zeta \\\\)</span>, which switches between two boundary values: <span>\\\\(\\\\zeta = 0\\\\)</span> and <span>\\\\(\\\\zeta = 1\\\\)</span>. The introduced trap function, <span>\\\\(\\\\Omega (\\\\Delta )\\\\)</span>, quantifies the subject’s perception of the object’s deviation from the unstable equilibrium or a desired state, thereby determining the current priority of the two behavioral modes. Crucially, these transitions— action points—occur before the trap function reaches its extreme values, <span>\\\\(\\\\Omega (\\\\Delta ) = 0\\\\)</span> or <span>\\\\(\\\\Omega (\\\\Delta ) = 1\\\\)</span>, underscoring the probabilistic nature of intermittent human control.</p>\",\"PeriodicalId\":503,\"journal\":{\"name\":\"Bulletin of the Lebedev Physics Institute\",\"volume\":\"52 7\",\"pages\":\"338 - 345\"},\"PeriodicalIF\":0.7000,\"publicationDate\":\"2025-08-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Bulletin of the Lebedev Physics Institute\",\"FirstCategoryId\":\"101\",\"ListUrlMain\":\"https://link.springer.com/article/10.3103/S1068335625602316\",\"RegionNum\":4,\"RegionCategory\":\"物理与天体物理\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"PHYSICS, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bulletin of the Lebedev Physics Institute","FirstCategoryId":"101","ListUrlMain":"https://link.springer.com/article/10.3103/S1068335625602316","RegionNum":4,"RegionCategory":"物理与天体物理","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"PHYSICS, MULTIDISCIPLINARY","Score":null,"Total":0}
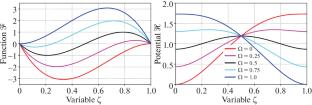
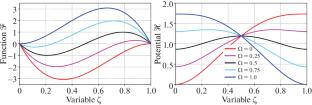
Within the paradigm of intermittent human control, we propose a novel model of dynamical traps to describe the balancing of a dynamical system near its unstable equilibrium. The core of this model is probabilistic, featuring alternating transitions between two behavioral modes of the subject – active and passive phases – in regulating the dynamics of the controlled object. These modes are delineated by action points, which represent the moments when the subject decides to switch between modes. This switching behavior is modeled using an original stochastic differential equation. Within this approach, action points are conceptualized as stepwise transitions in a special variable, \(\zeta \), which switches between two boundary values: \(\zeta = 0\) and \(\zeta = 1\). The introduced trap function, \(\Omega (\Delta )\), quantifies the subject’s perception of the object’s deviation from the unstable equilibrium or a desired state, thereby determining the current priority of the two behavioral modes. Crucially, these transitions— action points—occur before the trap function reaches its extreme values, \(\Omega (\Delta ) = 0\) or \(\Omega (\Delta ) = 1\), underscoring the probabilistic nature of intermittent human control.
期刊介绍:
Bulletin of the Lebedev Physics Institute is an international peer reviewed journal that publishes results of new original experimental and theoretical studies on all topics of physics: theoretical physics; atomic and molecular physics; nuclear physics; optics; lasers; condensed matter; physics of solids; biophysics, and others.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


