{"title":"前庭自我运动知觉模型在晕动病计算框架中的理论思考。","authors":"Takahiro Wada, Jelte E Bos","doi":"10.1007/s00422-025-01018-0","DOIUrl":null,"url":null,"abstract":"<p><p>This study examines self-motion perception incorporated into motion sickness models. Research on modeling self-motion perception and motion sickness has advanced independently, though both are thought to share neural mechanisms, making the construction of a unified model opportune. Models based on the Subjective Vertical Conflict (SVC) theory, a refinement of the neural mismatch theory, have primarily focused on motion sickness, with limited validation for self-motion perception. Emerging studies have begun evaluating the perceptual validity of these models, suggesting that some models can reproduce perception in specific paradigms, while they often struggle to jointly capture motion perception and sickness. One prior study demonstrated that one of the SVC models could replicate illusory tilt during centrifugation, while others produced unrealistic responses, such as persistent tilt after motion cessation. In reality, under steady-state conditions such as being motionless, perceived motion is expected to settle to an appropriate state regardless of prior states. Based on the idea that this behavior is closely related to the equilibrium points and stability of the model dynamics, this study theoretically analyzed 6DoF-SVC models with a focus on them. Results confirmed that only one model ensures convergence from any state to a unique equilibrium point corresponding to plausible perception. In contrast, other SVC models and a conventional self-motion perception model converged to values dependent on earlier states. Further analysis showed that only this model captured both the somatogravic and Ferris wheel illusion. In conclusion, this 6DoF-SVC model unifies motion perception and sickness modeling, with theoretical convergence of the perceptual state.</p>","PeriodicalId":55374,"journal":{"name":"Biological Cybernetics","volume":"119 4-6","pages":"22"},"PeriodicalIF":1.6000,"publicationDate":"2025-08-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12331883/pdf/","citationCount":"0","resultStr":"{\"title\":\"Theoretical considerations on models of vestibular self-motion perception as inherent in computational frameworks of motion sickness.\",\"authors\":\"Takahiro Wada, Jelte E Bos\",\"doi\":\"10.1007/s00422-025-01018-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>This study examines self-motion perception incorporated into motion sickness models. Research on modeling self-motion perception and motion sickness has advanced independently, though both are thought to share neural mechanisms, making the construction of a unified model opportune. Models based on the Subjective Vertical Conflict (SVC) theory, a refinement of the neural mismatch theory, have primarily focused on motion sickness, with limited validation for self-motion perception. Emerging studies have begun evaluating the perceptual validity of these models, suggesting that some models can reproduce perception in specific paradigms, while they often struggle to jointly capture motion perception and sickness. One prior study demonstrated that one of the SVC models could replicate illusory tilt during centrifugation, while others produced unrealistic responses, such as persistent tilt after motion cessation. In reality, under steady-state conditions such as being motionless, perceived motion is expected to settle to an appropriate state regardless of prior states. Based on the idea that this behavior is closely related to the equilibrium points and stability of the model dynamics, this study theoretically analyzed 6DoF-SVC models with a focus on them. Results confirmed that only one model ensures convergence from any state to a unique equilibrium point corresponding to plausible perception. In contrast, other SVC models and a conventional self-motion perception model converged to values dependent on earlier states. Further analysis showed that only this model captured both the somatogravic and Ferris wheel illusion. In conclusion, this 6DoF-SVC model unifies motion perception and sickness modeling, with theoretical convergence of the perceptual state.</p>\",\"PeriodicalId\":55374,\"journal\":{\"name\":\"Biological Cybernetics\",\"volume\":\"119 4-6\",\"pages\":\"22\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2025-08-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12331883/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biological Cybernetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s00422-025-01018-0\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, CYBERNETICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biological Cybernetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00422-025-01018-0","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
Theoretical considerations on models of vestibular self-motion perception as inherent in computational frameworks of motion sickness.
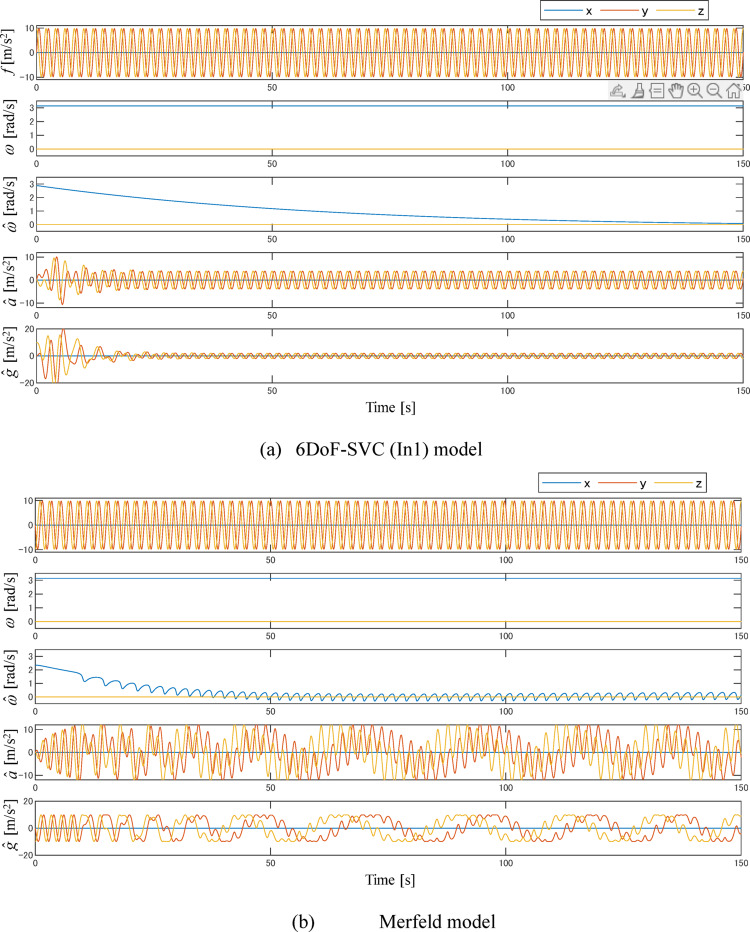
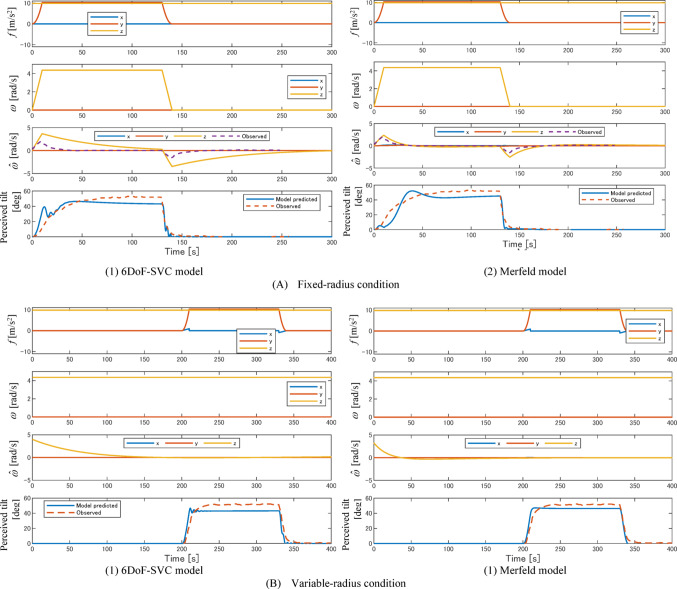
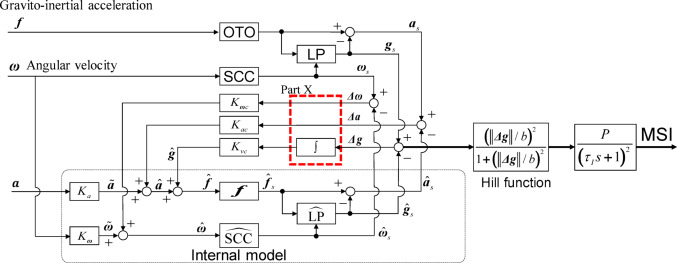
This study examines self-motion perception incorporated into motion sickness models. Research on modeling self-motion perception and motion sickness has advanced independently, though both are thought to share neural mechanisms, making the construction of a unified model opportune. Models based on the Subjective Vertical Conflict (SVC) theory, a refinement of the neural mismatch theory, have primarily focused on motion sickness, with limited validation for self-motion perception. Emerging studies have begun evaluating the perceptual validity of these models, suggesting that some models can reproduce perception in specific paradigms, while they often struggle to jointly capture motion perception and sickness. One prior study demonstrated that one of the SVC models could replicate illusory tilt during centrifugation, while others produced unrealistic responses, such as persistent tilt after motion cessation. In reality, under steady-state conditions such as being motionless, perceived motion is expected to settle to an appropriate state regardless of prior states. Based on the idea that this behavior is closely related to the equilibrium points and stability of the model dynamics, this study theoretically analyzed 6DoF-SVC models with a focus on them. Results confirmed that only one model ensures convergence from any state to a unique equilibrium point corresponding to plausible perception. In contrast, other SVC models and a conventional self-motion perception model converged to values dependent on earlier states. Further analysis showed that only this model captured both the somatogravic and Ferris wheel illusion. In conclusion, this 6DoF-SVC model unifies motion perception and sickness modeling, with theoretical convergence of the perceptual state.
期刊介绍:
Biological Cybernetics is an interdisciplinary medium for theoretical and application-oriented aspects of information processing in organisms, including sensory, motor, cognitive, and ecological phenomena. Topics covered include: mathematical modeling of biological systems; computational, theoretical or engineering studies with relevance for understanding biological information processing; and artificial implementation of biological information processing and self-organizing principles. Under the main aspects of performance and function of systems, emphasis is laid on communication between life sciences and technical/theoretical disciplines.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


