Abu Islam, Matthew DeHaven, Marshall Neipert, Nenad Nenadic
{"title":"电动汽车电池组拆卸自动化","authors":"Abu Islam, Matthew DeHaven, Marshall Neipert, Nenad Nenadic","doi":"10.1002/amp2.70025","DOIUrl":null,"url":null,"abstract":"<div>\n \n <p>Battery-electric vehicles (EVs) are growing exponentially. The demand for these batteries is expected to increase sevenfold by 2035. The EV batteries reach their end of life when the capacity fades to 70%–80% of new, with some being removed from the primary applications with even lower levels of degradation. These batteries can be used in less demanding applications. The disassembly process is currently manual, slow, unsafe, and expensive. Automation is needed to increase the throughput. EV battery packs feature various continually changing designs and form factors, which limit the usefulness of deterministically programmed robotic solutions. The conceptual robotic disassembly of EV batteries has attracted the attention of researchers. However, while many approaches have been proposed, practical implementations are lacking. We review proposed concepts for EV battery disassembly and describe the selected approach, with elements of partial solutions validated in a laboratory setting, including the selection of commercial solutions, the development of custom end effectors, and methodologies for detection, localization, and classification of fasteners. The computer vision tasks employed an overhead 2D camera to detect the type of battery pack and approximate localization of fasteners, and a 3D camera mounted on the robotic arm for precise localization (position and tilt) and classification.</p>\n </div>","PeriodicalId":87290,"journal":{"name":"Journal of advanced manufacturing and processing","volume":"7 3","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2025-06-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1002/amp2.70025","citationCount":"0","resultStr":"{\"title\":\"Automation for Electric Vehicle Battery Pack Disassembly\",\"authors\":\"Abu Islam, Matthew DeHaven, Marshall Neipert, Nenad Nenadic\",\"doi\":\"10.1002/amp2.70025\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div>\\n \\n <p>Battery-electric vehicles (EVs) are growing exponentially. The demand for these batteries is expected to increase sevenfold by 2035. The EV batteries reach their end of life when the capacity fades to 70%–80% of new, with some being removed from the primary applications with even lower levels of degradation. These batteries can be used in less demanding applications. The disassembly process is currently manual, slow, unsafe, and expensive. Automation is needed to increase the throughput. EV battery packs feature various continually changing designs and form factors, which limit the usefulness of deterministically programmed robotic solutions. The conceptual robotic disassembly of EV batteries has attracted the attention of researchers. However, while many approaches have been proposed, practical implementations are lacking. We review proposed concepts for EV battery disassembly and describe the selected approach, with elements of partial solutions validated in a laboratory setting, including the selection of commercial solutions, the development of custom end effectors, and methodologies for detection, localization, and classification of fasteners. The computer vision tasks employed an overhead 2D camera to detect the type of battery pack and approximate localization of fasteners, and a 3D camera mounted on the robotic arm for precise localization (position and tilt) and classification.</p>\\n </div>\",\"PeriodicalId\":87290,\"journal\":{\"name\":\"Journal of advanced manufacturing and processing\",\"volume\":\"7 3\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-06-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1002/amp2.70025\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of advanced manufacturing and processing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/ftr/10.1002/amp2.70025\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of advanced manufacturing and processing","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/ftr/10.1002/amp2.70025","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Automation for Electric Vehicle Battery Pack Disassembly
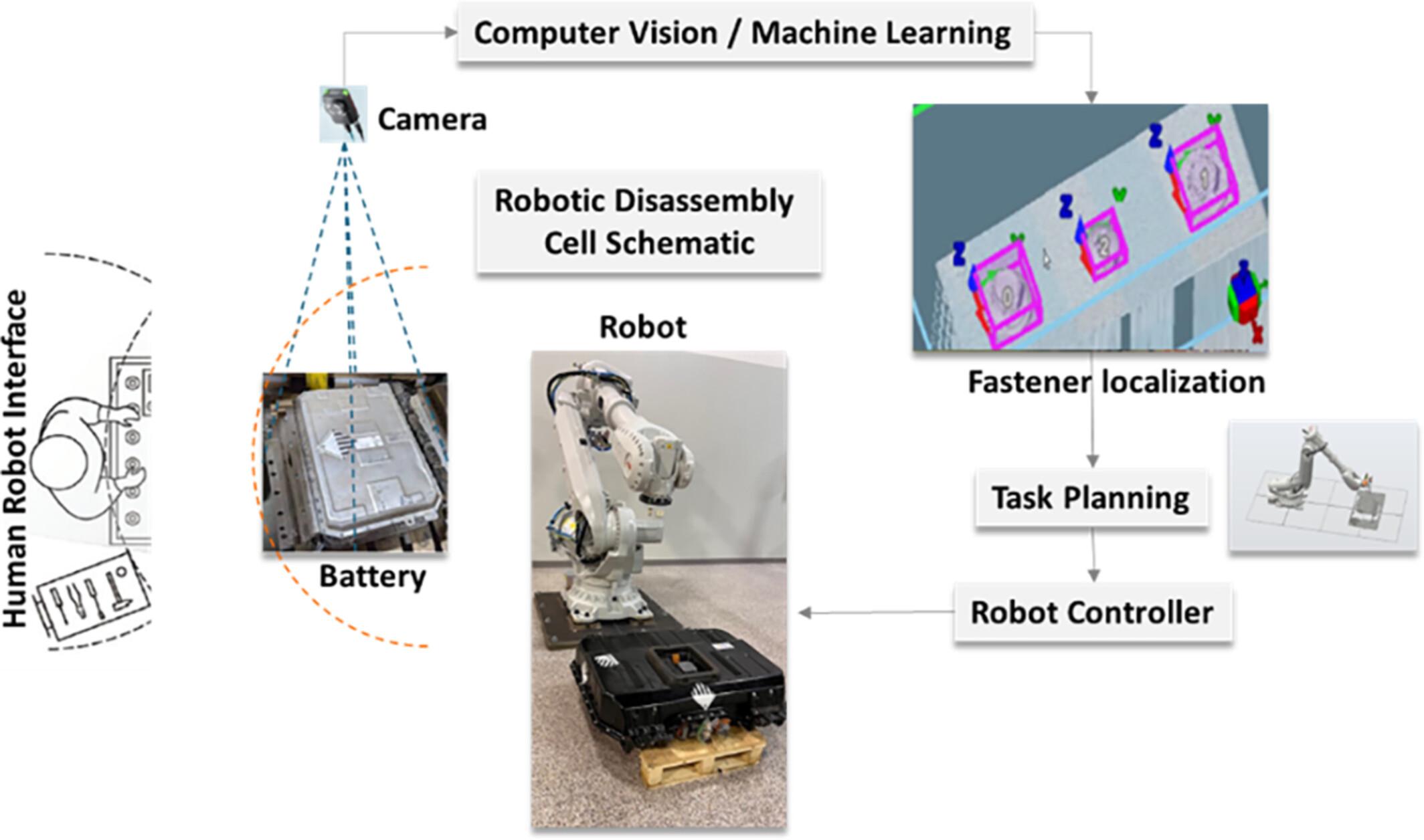
Battery-electric vehicles (EVs) are growing exponentially. The demand for these batteries is expected to increase sevenfold by 2035. The EV batteries reach their end of life when the capacity fades to 70%–80% of new, with some being removed from the primary applications with even lower levels of degradation. These batteries can be used in less demanding applications. The disassembly process is currently manual, slow, unsafe, and expensive. Automation is needed to increase the throughput. EV battery packs feature various continually changing designs and form factors, which limit the usefulness of deterministically programmed robotic solutions. The conceptual robotic disassembly of EV batteries has attracted the attention of researchers. However, while many approaches have been proposed, practical implementations are lacking. We review proposed concepts for EV battery disassembly and describe the selected approach, with elements of partial solutions validated in a laboratory setting, including the selection of commercial solutions, the development of custom end effectors, and methodologies for detection, localization, and classification of fasteners. The computer vision tasks employed an overhead 2D camera to detect the type of battery pack and approximate localization of fasteners, and a 3D camera mounted on the robotic arm for precise localization (position and tilt) and classification.




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


