Neel Patel, Rwik Rana, Deepesh Kumar, Nitish V Thakor
{"title":"SuperTac -通过降维实现触觉数据的超分辨率。","authors":"Neel Patel, Rwik Rana, Deepesh Kumar, Nitish V Thakor","doi":"10.3389/frobt.2025.1552922","DOIUrl":null,"url":null,"abstract":"<p><p>The advancement of tactile sensing in robotics and prosthetics is constrained by the trade-off between spatial and temporal resolution in artificial tactile sensors. To address this limitation, we propose SuperTac, a novel tactile super-resolution framework that enhances tactile perception beyond the sensor's inherent resolution. Unlike existing approaches, SuperTac combines dimensionality reduction and advanced upsampling to deliver high-resolution tactile information without compromising the performance. Drawing inspiration from the spatiotemporal processing of mechanoreceptors in human tactile systems, SuperTac bridges the gap between sensor limitations and practical applications. In this study, an in-house-built active robotic finger system equipped with a 4 × 4 tactile sensor array was used to palpate textured surfaces. The system, comprising a tactile sensor array mounted on a spring-loaded robotic finger connected to a 3D printer nozzle for precise spatial control, generated spatiotemporal tactile maps. These maps were processed by SuperTac, which integrates a Variational Autoencoder for dimensionality reduction and Residual-In-Residual Blocks (RIRB) for high-quality upsampling. The framework produces super-resolved tactile images (16 × 16), achieving a fourfold improvement in spatial resolution while maintaining computational efficiency for real-time use. Experimental results demonstrate that texture classification accuracy improves by 17% when using super-resolved tactile data compared to raw sensor data. This significant enhancement in classification accuracy highlights the potential of SuperTac for applications in robotic manipulation, object recognition, and haptic exploration. By enabling robots to perceive and interpret high-resolution tactile data, SuperTac marks a step toward bridging the gap between human and robotic tactile capabilities, advancing robotic perception in real-world scenarios.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1552922"},"PeriodicalIF":3.0000,"publicationDate":"2025-06-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12240741/pdf/","citationCount":"0","resultStr":"{\"title\":\"SuperTac - tactile data super-resolution via dimensionality reduction.\",\"authors\":\"Neel Patel, Rwik Rana, Deepesh Kumar, Nitish V Thakor\",\"doi\":\"10.3389/frobt.2025.1552922\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The advancement of tactile sensing in robotics and prosthetics is constrained by the trade-off between spatial and temporal resolution in artificial tactile sensors. To address this limitation, we propose SuperTac, a novel tactile super-resolution framework that enhances tactile perception beyond the sensor's inherent resolution. Unlike existing approaches, SuperTac combines dimensionality reduction and advanced upsampling to deliver high-resolution tactile information without compromising the performance. Drawing inspiration from the spatiotemporal processing of mechanoreceptors in human tactile systems, SuperTac bridges the gap between sensor limitations and practical applications. In this study, an in-house-built active robotic finger system equipped with a 4 × 4 tactile sensor array was used to palpate textured surfaces. The system, comprising a tactile sensor array mounted on a spring-loaded robotic finger connected to a 3D printer nozzle for precise spatial control, generated spatiotemporal tactile maps. These maps were processed by SuperTac, which integrates a Variational Autoencoder for dimensionality reduction and Residual-In-Residual Blocks (RIRB) for high-quality upsampling. The framework produces super-resolved tactile images (16 × 16), achieving a fourfold improvement in spatial resolution while maintaining computational efficiency for real-time use. Experimental results demonstrate that texture classification accuracy improves by 17% when using super-resolved tactile data compared to raw sensor data. This significant enhancement in classification accuracy highlights the potential of SuperTac for applications in robotic manipulation, object recognition, and haptic exploration. By enabling robots to perceive and interpret high-resolution tactile data, SuperTac marks a step toward bridging the gap between human and robotic tactile capabilities, advancing robotic perception in real-world scenarios.</p>\",\"PeriodicalId\":47597,\"journal\":{\"name\":\"Frontiers in Robotics and AI\",\"volume\":\"12 \",\"pages\":\"1552922\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-06-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12240741/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Robotics and AI\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3389/frobt.2025.1552922\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1552922","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
SuperTac - tactile data super-resolution via dimensionality reduction.
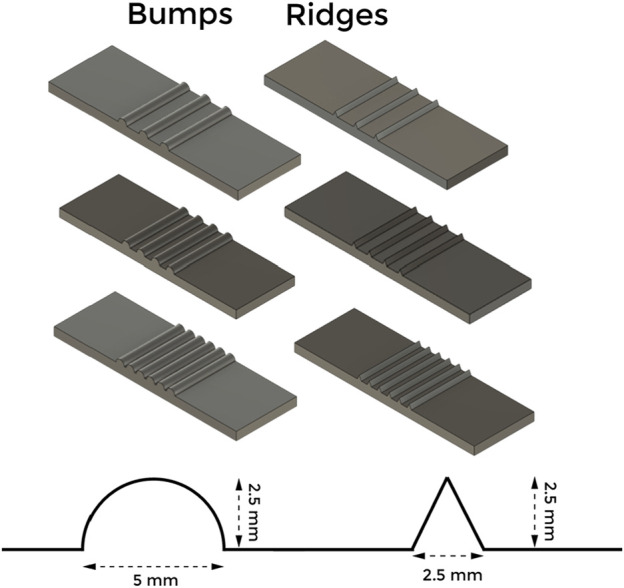
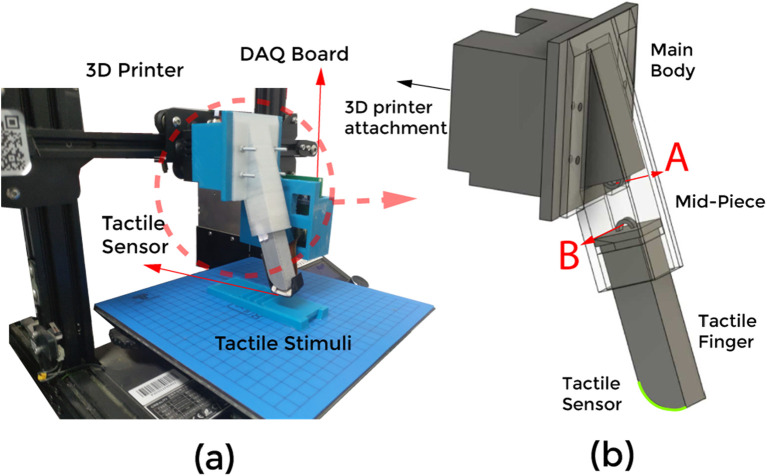
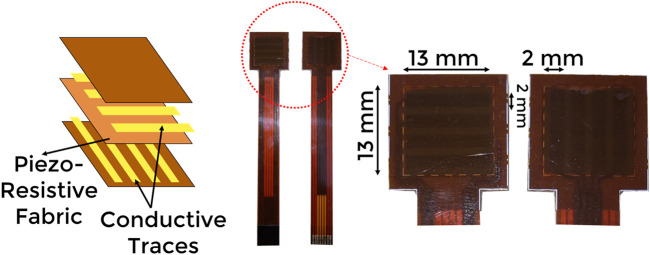
The advancement of tactile sensing in robotics and prosthetics is constrained by the trade-off between spatial and temporal resolution in artificial tactile sensors. To address this limitation, we propose SuperTac, a novel tactile super-resolution framework that enhances tactile perception beyond the sensor's inherent resolution. Unlike existing approaches, SuperTac combines dimensionality reduction and advanced upsampling to deliver high-resolution tactile information without compromising the performance. Drawing inspiration from the spatiotemporal processing of mechanoreceptors in human tactile systems, SuperTac bridges the gap between sensor limitations and practical applications. In this study, an in-house-built active robotic finger system equipped with a 4 × 4 tactile sensor array was used to palpate textured surfaces. The system, comprising a tactile sensor array mounted on a spring-loaded robotic finger connected to a 3D printer nozzle for precise spatial control, generated spatiotemporal tactile maps. These maps were processed by SuperTac, which integrates a Variational Autoencoder for dimensionality reduction and Residual-In-Residual Blocks (RIRB) for high-quality upsampling. The framework produces super-resolved tactile images (16 × 16), achieving a fourfold improvement in spatial resolution while maintaining computational efficiency for real-time use. Experimental results demonstrate that texture classification accuracy improves by 17% when using super-resolved tactile data compared to raw sensor data. This significant enhancement in classification accuracy highlights the potential of SuperTac for applications in robotic manipulation, object recognition, and haptic exploration. By enabling robots to perceive and interpret high-resolution tactile data, SuperTac marks a step toward bridging the gap between human and robotic tactile capabilities, advancing robotic perception in real-world scenarios.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


