学习通过仿生步态策略适应多用途四足运动
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
有腿的机器人必须调整它们的步态来应对不可预测的环境,这是动物们可以轻松应对的挑战。然而,大多数四足运动的深度强化学习(DRL)方法依赖于固定的步态,限制了对地形和动态变化的适应性。在这里,我们展示了整合动物运动-步态转换策略,步态记忆和实时运动调整的三个核心原则,使DRL控制框架能够在多个步态之间流畅切换并从不稳定中恢复,而无需外部传感。我们的框架是由生物力学启发的指标,捕捉效率,稳定性和系统的限制,这是统一的通知最佳步态选择。由此产生的框架实现了在各种真实地形上的盲零射击部署,并且大大优于基线控制器。通过将生物学原理嵌入到数据驱动的控制中,这项工作标志着向鲁棒、高效和通用的机器人运动迈出了一步,突出了动物运动智能如何塑造下一代自适应机器。本文章由计算机程序翻译,如有差异,请以英文原文为准。

Learning to adapt through bio-inspired gait strategies for versatile quadruped locomotion
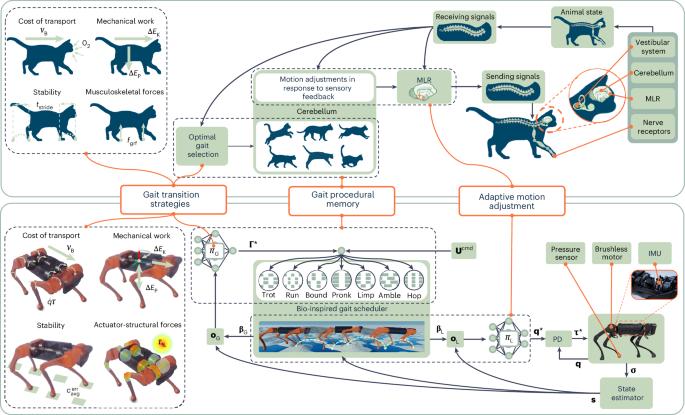
Legged robots must adapt their gait to navigate unpredictable environments, a challenge that animals master with ease. However, most deep reinforcement learning (DRL) approaches to quadruped locomotion rely on a fixed gait, limiting adaptability to changes in terrain and dynamic state. Here we show that integrating three core principles of animal locomotion-gait transition strategies, gait memory and real-time motion adjustments enables a DRL control framework to fluidly switch among multiple gaits and recover from instability, all without external sensing. Our framework is guided by biomechanics-inspired metrics that capture efficiency, stability and system limits, which are unified to inform optimal gait selection. The resulting framework achieves blind zero-shot deployment across diverse, real-world terrains and substantially outperforms baseline controllers. By embedding biological principles into data-driven control, this work marks a step towards robust, efficient and versatile robotic locomotion, highlighting how animal motor intelligence can shape the next generation of adaptive machines. Humphreys and Zhou present a learning-based robot control framework inspired by animal gait mechanisms that enables quadruped robots to generalize to diverse real-world terrains, transition between gaits and recover from instability.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


