Mostafa Selim, Lars Eisenburger, Tom Dijkhuis, Martijn Van Dam, Alexander Broersen, Douwe Dresscher, Jouke Dijkstra, Momen Abayazid
{"title":"增强触觉反馈的虚拟插针框架实验评价。","authors":"Mostafa Selim, Lars Eisenburger, Tom Dijkhuis, Martijn Van Dam, Alexander Broersen, Douwe Dresscher, Jouke Dijkstra, Momen Abayazid","doi":"10.1007/s11548-025-03420-2","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>Haptic feedback could improve the efficiency of needle insertion procedures by providing surgeons with enhanced sensing and guiding capabilities. A framework has been developed to provide physicians with enhanced haptic feedback during CT-guided needle insertion procedures in oncology.</p><p><strong>Methods: </strong>The physicians encountered needle-tissue interaction and guidance forces with visual feedback to accurately reach the tumor. The force feedback to users was enhanced by amplifying several parameters in the feedback model, such as tip forces and radial forces. The study evaluated the effect of multiple haptic and visual feedback algorithms on user performance in efficiently inserting the needle. In this experimental pilot study, 12 participants including three interventional radiologists engaged in five experimental scenarios simulating a needle insertion.</p><p><strong>Results: </strong>The results showed that enhanced force feedback for tumor perception reduced tumor targeting error and trajectory deviation, compared to natural force feedback. This was also the case when tumor perception and haptic guidance were both enhanced. Additionally, real-time visual feedback and enhanced force feedback for guidance reduced the duration to finish the task significantly. Participants still preferred real-time visual feedback over enhanced haptic feedback cues.</p><p><strong>Conclusions: </strong>On average, small tumors (around 3mm in diameter) can be successfully targeted with enhanced haptic feedback in the radial and axial directions. Additionally, critical regions, such as veins within the liver, can be avoided more effectively as users maintain the desired trajectory with greater accuracy.</p>","PeriodicalId":51251,"journal":{"name":"International Journal of Computer Assisted Radiology and Surgery","volume":" ","pages":"1643-1652"},"PeriodicalIF":2.3000,"publicationDate":"2025-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12350536/pdf/","citationCount":"0","resultStr":"{\"title\":\"Experimental evaluation of virtual needle insertion framework with enhanced haptic feedback.\",\"authors\":\"Mostafa Selim, Lars Eisenburger, Tom Dijkhuis, Martijn Van Dam, Alexander Broersen, Douwe Dresscher, Jouke Dijkstra, Momen Abayazid\",\"doi\":\"10.1007/s11548-025-03420-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Purpose: </strong>Haptic feedback could improve the efficiency of needle insertion procedures by providing surgeons with enhanced sensing and guiding capabilities. A framework has been developed to provide physicians with enhanced haptic feedback during CT-guided needle insertion procedures in oncology.</p><p><strong>Methods: </strong>The physicians encountered needle-tissue interaction and guidance forces with visual feedback to accurately reach the tumor. The force feedback to users was enhanced by amplifying several parameters in the feedback model, such as tip forces and radial forces. The study evaluated the effect of multiple haptic and visual feedback algorithms on user performance in efficiently inserting the needle. In this experimental pilot study, 12 participants including three interventional radiologists engaged in five experimental scenarios simulating a needle insertion.</p><p><strong>Results: </strong>The results showed that enhanced force feedback for tumor perception reduced tumor targeting error and trajectory deviation, compared to natural force feedback. This was also the case when tumor perception and haptic guidance were both enhanced. Additionally, real-time visual feedback and enhanced force feedback for guidance reduced the duration to finish the task significantly. Participants still preferred real-time visual feedback over enhanced haptic feedback cues.</p><p><strong>Conclusions: </strong>On average, small tumors (around 3mm in diameter) can be successfully targeted with enhanced haptic feedback in the radial and axial directions. Additionally, critical regions, such as veins within the liver, can be avoided more effectively as users maintain the desired trajectory with greater accuracy.</p>\",\"PeriodicalId\":51251,\"journal\":{\"name\":\"International Journal of Computer Assisted Radiology and Surgery\",\"volume\":\" \",\"pages\":\"1643-1652\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2025-08-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12350536/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Computer Assisted Radiology and Surgery\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11548-025-03420-2\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/6/24 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q3\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Assisted Radiology and Surgery","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11548-025-03420-2","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/6/24 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
Experimental evaluation of virtual needle insertion framework with enhanced haptic feedback.
Purpose: Haptic feedback could improve the efficiency of needle insertion procedures by providing surgeons with enhanced sensing and guiding capabilities. A framework has been developed to provide physicians with enhanced haptic feedback during CT-guided needle insertion procedures in oncology.
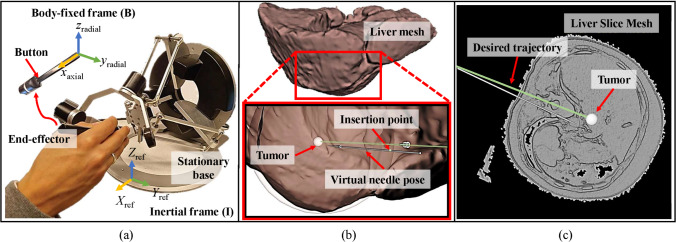
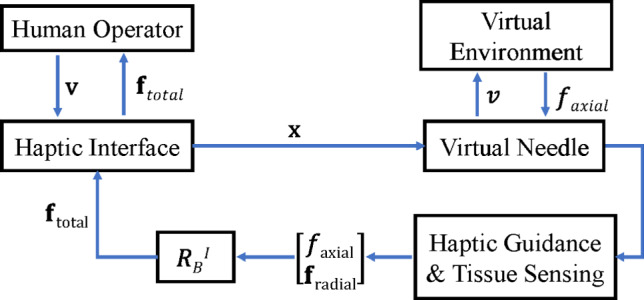
Methods: The physicians encountered needle-tissue interaction and guidance forces with visual feedback to accurately reach the tumor. The force feedback to users was enhanced by amplifying several parameters in the feedback model, such as tip forces and radial forces. The study evaluated the effect of multiple haptic and visual feedback algorithms on user performance in efficiently inserting the needle. In this experimental pilot study, 12 participants including three interventional radiologists engaged in five experimental scenarios simulating a needle insertion.
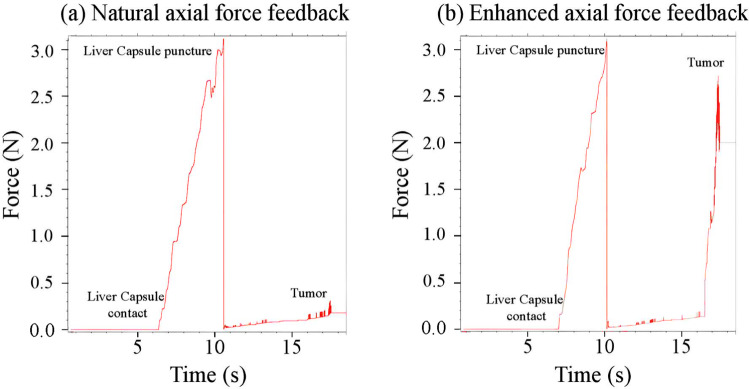
Results: The results showed that enhanced force feedback for tumor perception reduced tumor targeting error and trajectory deviation, compared to natural force feedback. This was also the case when tumor perception and haptic guidance were both enhanced. Additionally, real-time visual feedback and enhanced force feedback for guidance reduced the duration to finish the task significantly. Participants still preferred real-time visual feedback over enhanced haptic feedback cues.
Conclusions: On average, small tumors (around 3mm in diameter) can be successfully targeted with enhanced haptic feedback in the radial and axial directions. Additionally, critical regions, such as veins within the liver, can be avoided more effectively as users maintain the desired trajectory with greater accuracy.
期刊介绍:
The International Journal for Computer Assisted Radiology and Surgery (IJCARS) is a peer-reviewed journal that provides a platform for closing the gap between medical and technical disciplines, and encourages interdisciplinary research and development activities in an international environment.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


