一种新的间接肌肉力传感方法,为具有相等和不相等约束的生物力学多体系统量身定制
IF 4.5
1区 工程技术
Q1 ENGINEERING, MECHANICAL
引用次数: 0
摘要
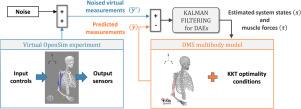
肌肉力量在日常活动中起着至关重要的作用,可以提高身体效率、肌肉骨骼健康,以及在运动、工作和康复中的表现。由于解剖学和伦理的限制,直接测量肌肉力量是不切实际的,这导致研究人员依赖于间接方法,如基于肌电图的技术。虽然这些方法捕捉肌肉活动,但它们容易受到噪音的影响,需要大量的后处理。另外,生物力学多体模型忠实地代表了人体运动,实现了详细的运动学和动力学分析。然而,它们在肌肉招募中存在冗余,使得逆动力学问题不确定。基于优化的方法通常用于解决这个问题,但它们依赖于多层解决方案,忽略了可能的模型漂移和测量噪声。最近的方法采用卡尔曼滤波来间接估计系统动力学。虽然它们对关节力重建是有效的,但在肌肉力估计中的应用受到冗余问题的限制。本研究提出了一种新的基于卡尔曼滤波的约束多体模型框架,利用非侵入式传感器来估计系统动力学和肌肉力。该框架使用OpenSim模拟上肢肌肉骨骼模型进行基准测试,重点关注肩膀和肘部的运动。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A novel indirect muscle force sensing approach tailored for biomechanical multibody systems with equality and inequality constraints
Muscle forces play a crucial role in daily activities, enhancing physical efficiency, musculoskeletal health, and performance in sports, work, and rehabilitation. The direct measure of muscle forces is impractical due to anatomical and ethical constraints, leading researchers to rely on indirect methods like electromyography-based techniques. While these methods capture muscle activities, they are prone to noise and require extensive post-processing. Alternatively, biomechanical multibody models faithfully represent human movement, enabling detailed kinematic and dynamic analyses. However, they suffer the redundancy in muscle recruitment, making inverse dynamics problems underdetermined. Optimization-based approaches are often used to solve this problem, but they lean on multi-layer solutions that overlook possible model drift and measurement noise. Recent approaches employ Kalman filters to indirectly estimate the system dynamics. While effective for joint force reconstruction, their application to muscle force estimation is limited by redundancy issues. This study proposes a novel Kalman filter-based framework for constrained multibody models, leveraging non-invasive sensors to estimate system dynamics and muscle forces. The framework is benchmarked using OpenSim simulations of an upper-limb muscular-skeletal model, focusing on shoulder and elbow movements.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Mechanism and Machine Theory
工程技术-工程:机械
CiteScore
9.90
自引率
23.10%
发文量
450
审稿时长
20 days
期刊介绍:
Mechanism and Machine Theory provides a medium of communication between engineers and scientists engaged in research and development within the fields of knowledge embraced by IFToMM, the International Federation for the Promotion of Mechanism and Machine Science, therefore affiliated with IFToMM as its official research journal.
The main topics are:
Design Theory and Methodology;
Haptics and Human-Machine-Interfaces;
Robotics, Mechatronics and Micro-Machines;
Mechanisms, Mechanical Transmissions and Machines;
Kinematics, Dynamics, and Control of Mechanical Systems;
Applications to Bioengineering and Molecular Chemistry
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


